Теория обнаружения сигнала
Теория обнаружения сигнала (ТОС) — современный психофизический метод, учитывающий вероятностный характер обнаружения стимула, в котором наблюдатель рассматривается как активный субъект принятия решения в ситуации неопределённости. Теория обнаружения сигнала описывает сенсорный процесс как двухступенчатый: процесс отображения физической энергии стимула в интенсивность ощущения и процесс принятия решения субъектом.
История[править | править код]
Основное развитие теории обнаружения сигнала пришлось на 1952-1954 годы. Значительный вклад в теоретическое развитие был внесён учёными из Мичиганского университета: Петерсоном[англ.], Бердсоллом и Фокс.[1] В 1954 году также были проведены психоакустические эксперименты и исследования в области зрения, которые подтвердили значимость теории обнаружения сигнала. В 1966 году теория обнаружения сигнала была в деталях разработана и представлена в работе Грина и Светса.[2]
Отличия от классической психофизики[править | править код]
Теория обнаружения сигнала имеет 4 аспекта, которые не учитывает классическая психофизика:
- Вероятностная природа обнаружения сигнала субъектом. Одно и то же стимульное воздействие может вызывать различные по интенсивности ощущения. Наблюдается вероятностный характер ответов об одном и том же стимуле.
- Наличие ложных тревог и пропусков. ТОС учитывает возможность пропусков сигнальных проб и ложных тревог в пробах, где отсутствует сигнал.
- Активность процесса обнаружения сигнала субъектом. Субъект рассматривается как активный наблюдатель, действующий в ситуации неопределённости, а не как пассивный приемник стимульной информации.
- Влияние несенсорных факторов на принятие решения. На решение субъекта о наличии или отсутствии стимула влияют различные факторы, не относящиеся к параметрам стимуляции. Такими факторами может выступать предварительное информирование субъекта, обратная связь, платёжная матрица и другие факторы, не являющиеся физическими параметрами стимулов.
Общие положения[править | править код]
В стимульном потоке выделяется свойство, которое в силу характерных особенностей обращает внимание наблюдателя — сигнальный стимул. Пустой стимул (шум) — отсутствие сигнального стимула в пробе. Наблюдатель может использовать две категории ответов: «да», «нет». Наблюдатель должен обнаруживать стимул и реагировать на него ответом «да» (есть признак), в случае если признак не обнаружен, наблюдатель должен давать ответ «нет» (нет признака). При решении данной задачи наблюдатель основывается на установленной схеме соответствия, между особенностями сенсорного образа стимула и принимаемым решением. На установление схемы соответствия оказывают влияние не только характеристики стимулов, но и несенсорные факторы.
Применяется 5 процентных соотношений наличия стимулов и шумов в различных пробах: 10 %, 30 %, 50 %, 70 %, 90 % стимулов. Серии проводятся методом «на гору — с горы»: от 10 % к 90 % и от 90 % к 10 %.
Существует 4 исхода в ситуации обнаружения сигнала: правильное попадание (есть стимул — ответ «да»), правильное отрицание (нет стимула — ответ «нет»), пропуск (есть стимул — ответ «нет»), ложная тревога (нет стимула — ответ «да»).
| Стимул | Ответ | |
|---|---|---|
| Да | Нет | |
| Сигнал | Правильное попадание (H; hit) | Отрицание (O; omission) |
| Шум | Ложная тревога (FA; false alarm) | Правильное отрицание (CR; correct rejection) |
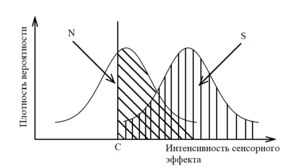
Общая модель обнаружения сигнала представляет собой два колоколообразных перекрывающихся распределения. В различных вариантах ТОС данные функции являются нормальным, биномиальным или экспоненциальным распределениями.[3] Критерий принятия решения (С), основанный на схеме соответствия, определяет правило принятия решения о наличии или отсутствии стимула. Данный критерий отражает вероятность ложных тревог и правильных попаданий при определённой интенсивности стимула.
На основе данного критерия строится кривая, называемая рабочая характеристика наблюдателя и определяется мера чувствительности наблюдателя (d'). Мера чувствительности является постоянной величиной для конкретного наблюдателя с определённой стимуляцией.
Критерий принятия решения[править | править код]
Принятие решения зависит от выбора критерия принятия решения (граничной точки, С). Выделяют три вида критериев:
- Симметричный — находится в центре пересечений двух распределений. Выбор такой стратегии обусловлен желанием совершать меньше ошибочных ответов. При такой стратегии отрицания и ложные тревоги равновероятны.

Симметричный критерий принятия решения (N — Шум, S — Сигнал) - Либеральный — критерий сдвинут в сторону кривой шума. Выбор такого критерия обусловлен желанием не пропустить стимул. Количество правильных попаданий и ложных тревог при такой стратегии увеличивается.
Либеральный критерий принятия решения (N — Шум, S — Сигнал) - Жёсткий — критерий сдвинут в сторону кривой сигнала. Выбор такой стратегии обусловлен желанием не отреагировать на шум ответом «да». Количество правильных ответов и ложных тревог уменьшается.

Жесткий критерий принятия решения (N — Шум, S — Сигнал)



Таким образом, путём изменения схемы достигается одновременное увеличение или уменьшение FA и H (также как невозможно увеличить или уменьшить одновременно ошибки обоих родов FA и O). На выбор критерия влияют несенсорные факторы и стратегия, выбранная человеком.
Рабочая характеристика наблюдателя[править | править код]
Рабочая характеристика наблюдателя, (РХ) отражает зависимость вероятности попаданий от вероятности ложных тревог. Расстояние кривой РХ от основной диагонали квадрата является мерой чувствительности (d') данного наблюдателя к данному сигналу.

- Идеальный наблюдатель — кривые сигнала и шума не перекрываются, наблюдатель не делает ложных тревог и пропусков. Кривая РХ представлена точкой в левом верхнем углу квадрата
- Нечувствительный к сигналу наблюдатель — кривые сигнала и шума практически полностью перекрывают друг друга. Кривая РХ является диагональю квадрата.
- Реальный наблюдатель с повышенной чувствительностью — кривые сигнала и шума незначительно перекрываются, кривая РХ удалена от диагонали квадрата
- Наблюдатель с пониженной чувствительностью — кривые сигнала и шума значительно перекрываются. Кривая РХ находится близко к диагонали квадрата
Несенсорные факторы[править | править код]
Несенсорные факторы модифицируют схему соответствия испытуемого и вводятся в качестве контроля экспериментатора за данной схемой.
Предварительное информирование — предупреждение о пропорции проб со стимулом и пустых проб. Может даваться ложная информация.
Обратная связь — информация об истинности/ложности ответов наблюдателя. Может быть ложной. Даётся после каждой пробы, либо после группы проб (в виде частоты правильных ответов).
Платёжная матрица — система выплат и штрафов за верные и неверные ответы. Платёжная матрица способствует эффективности и дифференцированности контроля схемы принятия решения и повышает мотивацию наблюдателя.
- Симметричная платёжная матрица — правильные ответы (Н, CR) поощряются одной и той же суммой; ошибки (FA, O) одинаково штрафуются.
- Несимметричная платёжная матрица — правильные ответы (Н, CR) поощряются одинаково; ошибки (FA, O) штрафуются на разную сумму: штраф за FA меньше штрафа за O.
Классические методы обнаружения сигналов[править | править код]
- Метод «Да — нет». Процедура проведения эксперимента заключается в рандомизированном предъявлении стимулов друг за другом через регулярные промежутки времени. Ответы даются в двухкатегориальной системе.
- Метод двухальтернативного вынужденного выбора (2АВВ). Стимулы предъявляются парами, друг за другом или одновременно с пространственным разделением. Ответы даются как в методе «Да — нет». В данном методе стимулы и шумы предъявляются симметрично (стимул-шум, шум-стимул), поэтому условные вероятности правильных ответов (Н, CR) равны.
- Метод оценки. Процедура проведения эксперимента аналогична методу «Да — нет» или методу 2АВВ (в зависимости от модификации). Ответы даются в категориях степени уверенности (обычно используется 7 категорий ответов). Применяются следующие категории: «совершенно уверен, что сигнал был», «уверен, что сигнал был», «скорее был, чем не был», «не могу выбрать», «скорее не был, чем был», «уверен, что сигнала не было», «совершенно уверен, что сигнала не было». Метод оценки даёт возможность получить несколько точек РХ в одном эксперименте.[4]
Примечания[править | править код]
- ↑ Peterson, W.W., Birdsall, T. G. & Fox, W. C. (1954) The theory of signal detectability. Proceedings of the IRE Professional Group on Information Theory 4, 171-212.
- ↑ Green, D.M., Swets J.A. Signal Detection Theory and Psychophysics. 1966. New York: Wiley – ISBN 0-471-32420-5.
- ↑ Гусев А. Н., Измайлов Ч. А., Михалевская М. Б. Измерение в психологии: общий психологический практикум. 2-е изд. М: Смысл, 1998 — 286с.
- ↑ Гусев А. Н. Общая психология: в 7 т.: учебник для студ. высш. учеб. заведений/под редакцией Б. С. Братуся. Т. 2: Ощущение и восприятие. М: Издательский центр «Академия», 2007. — 416с.
Литература[править | править код]
- Гусев А. Н., Измайлов Ч. А., Михалевская М. Б. Измерение в психологии: общий психологический практикум. 2-е изд. М: Смысл, 1998 – 286с – ISBN 5-89357-045-6.
- Гусев А. Н. Общая психология: в 7 т.: учебник для студ. высш. учеб. заведений/под редакцией Б. С. Братуся. Т. 2: Ощущение и востприятие. М: Издательский центр «Академия», 2007. – 416с – ISBN 978-5-7695-3361-7.
- Психология: Учебник для гуманитарных вузов. 2-е изд. / Под общ. ред. В. Н. Дружинина. — СПб.: Питер, 2009. — 656 с.: ил. — (Серия «Учебник для вузов») – ISBN 978-5-388-00491-8.
- Swets J.A. Detection theory and psychophysics: A review. // Psychometrika – vol. 26, no. 1. March 1961.