Mars Pathfinder
| Mars Pathfinder | |
|---|---|
 «Марс Пасфайндер» и марсоход «Соджорнер» при сворачивании в стартовое положение. (Лаборатория реактивного движения, октябрь 1996 года) | |
| Заказчик |
|
| Оператор | Лаборатория реактивного движения и НАСА |
| Стартовая площадка |
|
| Ракета-носитель | Дельта-2 7925 D240 |
| Запуск | 4 декабря 1996 06:58:00 UTC |
| COSPAR ID | 1996-068A |
| SCN | 24667 |
| Технические характеристики | |
| Масса | 463 кг (марсианская станция: 264 кг, марсоход: 11,5 кг) |
| Источники питания | марсианская станция: 35 Вт, марсоход: 13 Вт |
| Элементы орбиты | |
| Посадка на небесное тело |
4 июля 1997 16:57 UTC |
| Логотип миссии | |
 |
|
Mars Pathfinder («Марсопроходец» по аналогии с землепроходцем; в источниках также Марс Пасфайндер[1][2] или Марс Патфайндер[3]) — программа НАСА по изучению Марса с помощью стационарной марсианской станции и марсохода «Соджорнер» (англ. Sojourner — «Постоялец»). Станцию позже переименовали в Мемориальную станцию Карла Сагана. Соджорнер стал первым планетоходом, действующим за пределами системы Земля — Луна.
Основной целью программы была отработка технических решений, таких как схема дешёвой посадки; дополнительной целью было проведение научных исследований: получение снимков поверхности, изучение состава пород с помощью спектрометра[4], исследование атмосферы[5].
Ход полёта[править | править код]
Аппарат «Mars Pathfinder», полной массой 895 кг и размерами 1,5 × 2,65 м (включая топливо и марсоход Соджорнер размерами 65 × 48 × 30 см и весом 11,5 кг[6]) был запущен 4 декабря 1996 года НАСА с помощью ракеты-носителя Дельта-2 через месяц после запуска Марс Глобал Сервейор. Посадка аппарата на поверхность Марса состоялась 4 июля 1997 года в долине Арес, в районе равнины Хриса.
Спускаемый аппарат вошёл в атмосферу на скорости свыше 7,5 км/с[7], при этом теплоизоляционная защита предохраняла его от перегрева во время торможения в атмосфере. Лобовой экран в течение двух минут погасил скорость до 400 м/с. Затем был раскрыт парашют диаметром 12,7 м. Примерно за 8 секунд до удара о поверхность включились тормозные двигатели, и надулись амортизационные баллоны. Аппарат достиг поверхности Марса на скорости 25 м/с (90 км/ч) и отскочил от неё несколько раз до полной остановки.
Из-за сбоя на станции Сети дальней связи НАСА отделить марсоход в тот же день не удалось. К тому же обнаружилась нестабильность связи между марсианской станцией и марсоходом, которую удалось устранить только к 17:00 следующего дня[5].
5 июля марсоход «Соджорнер» съехал с марсианской станции и 6 июля приступил к научным экспериментам (в частности, изучению ближайшего камня). 6 июля была также передана круговая панорама, снятая камерой марсианской станции. В дальнейшем марсоход изучил ещё несколько камней, а станция измеряла параметры ветра, температуру и делала снимки.

27 сентября 1997 года состоялся последний сеанс связи с марсианской станцией (сигнал, не содержащий данных, удавалось принимать до 7 октября, а попытки установить связь с ней предпринимались до марта 1998 года). 10 марта 1998 года программа «Mars Pathfinder» была признана законченной. Марсианская станция проработала на поверхности планеты 3 месяца, гораздо больше расчётного времени (по плану — от недели до месяца).
По версии исследователей, сбой произошёл из-за батареи, вышедшей из строя вследствие большого числа циклов разряда/заряда. Батарея использовалась для нагрева электроники станции до уровня чуть выше ожидаемой ночной температуры Марса. После отказа батареи низкие температуры привели к выходу из строя критически важных систем, и, в конечном итоге, потере связи.
Описание космического аппарата[править | править код]
Марсианская станция[править | править код]

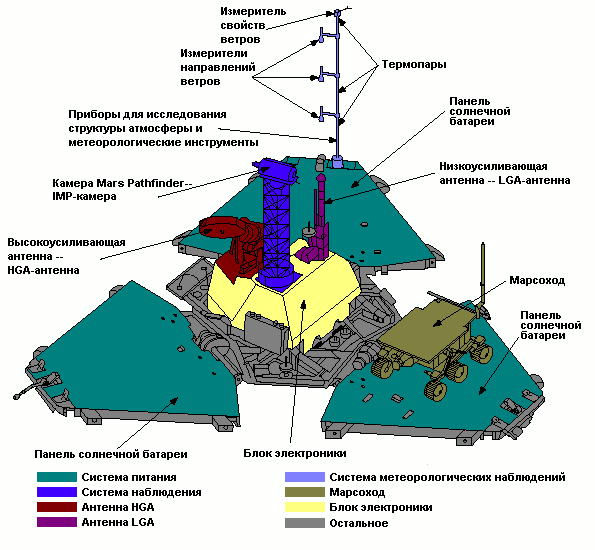
Марсианская станция (см. схему) оборудована тремя панелями солнечных батарей общей площадью 2,8 м², обеспечивающих мощность 35 Вт в солнечный день. Помимо них станция была также оснащена аккумуляторами.
Марсианская станция имела фотокамеру (IMP), размещённую на выдвигаемой мачте высотой до 1,8 м. Камера оборудована двумя оптическими входами (для получения стереоснимков) и фильтрами с 12 цветовыми оттенками (экспозиции через разные светофильтры после совмещения дают возможность получать цветные снимки). На станции был установлен метеокомплекс ASI/MET с датчиками для измерения скорости и направления ветра, атмосферного давления и температуры, а также магниты для извлечения из грунта магнитных частиц размером до 0,1 мм.
Марсианская станция была оборудована антеннами высокого и низкого усиления (в некоторые дни электроэнергии для работы основной антенны высокого усиления не хватало и данные передавались по антенне низкого усиления со скоростью 40—150 бит/с; основная антенна позволяла поддерживать связь на скорости свыше 8 Кбит/с). Работой станции управлял компьютер RAD6000 с 32-разрядным процессором и 128 МБ памяти. На борту применялась операционная система VxWorks[8].
Марсоход Sojourner[править | править код]
Масса марсохода (см. схему) составляла вместе со всем оборудованием около 15,5 кг, вес во время работы на поверхности Марса — 10,6 кг; размеры — 0,65×0,48×0,3 м. В Sojourner используется 11 двигателей постоянного тока RE016DC мощностью 3,2 Вт, созданных компанией «Maxon Motor». Шесть двигателей вращают колёса, по одному на каждое колесо, 4 задают направление движения и последний поднимает и опускает спектрометр. Двигатели могут переносить температуры до −100 °C[9].

Марсоход был оборудован шестью колёсами диаметром 13 см, каждое из которых способно вращаться самостоятельно. Аппарат способен наклоняться на 45° без переворачивания и преодолевать препятствия высотой до 20 см.
Электропитание Sojourner осуществлялось с помощью солнечной батареи с элементами на основе арсенида галлия. Площадь батареи 0,2 м², фирма-изготовитель «Tecstar Inc.». Мощности батареи хватало для работы аппарата в течение нескольких часов в день даже в пасмурную погоду. Кроме того, в марсоходе имелось три радиоизотопных элемента с несколькими граммами плутония-238 для поддержания необходимой температуры в электронном блоке.
Связь с Землёй марсоход поддерживал через марсианскую станцию. Марсоход был оборудован тремя камерами — передней стереосистемой и задней одинарной камерой. Аппарат также имел спектрометр для изучения химического состава пород. Управление Sojourner осуществлялось с помощью 8-разрядного процессора Intel 80C85, работающего на частоте 100 кГц, объём оперативной памяти составлял 512 кБайт, также имелся твердотельный накопитель на флеш-памяти объёмом 176 кБайт. Работал без операционной системы.
Научные результаты[править | править код]
Получив несколько изображений неба при различном положении светила, учёные смогли определить, что радиус частиц в составе розовой дымки составляет около 1 микрометра. Судя по цвету, грунт богат гидроксидом железа, что говорит в пользу теории о теплом влажном климате в прошлом. Pathfinder нёс на своём борту несколько магнитов для оценки магнитной составляющей марсианской пыли. В конце концов, все кроме одного магнита покрылись пылью. Так как самый слабый магнит не собрал на себе ни частички грунта, был сделан вывод, что воздушная пыль не содержит чистый магнетит (магнитный железняк) или оксимагнетитов. Вероятно, оседание пыли было спровоцировано оксидом железа (Fe2O3). Позднее, используя более простые инструменты, марсоход Спирит обнаружил, что только наличие магнетита может объяснить магнитные свойства пыли и почвы Марса.
Ежедневное отслеживание доплеровского смещения и менее частое измерение расстояния между космическим аппаратом и станциями дальней космической связи во время сеансов связи позволило определить положение марсианской станции и направление оси вращения Марса. Полученные данные, с учётом сведений ранее полученных спускаемыми аппаратами Викинг, позволили втрое улучшить определение прецессионной константы Марса. Определённая степень прецессии согласуется с гипотезой что негидростатическая составляющая полюсного момента инерции вызвана существованием огромного вулканического нагорья Фарсида. Вычислено что радиус металлического ядра Марса составляет от 1300 до 2000 км.[10]
Всего было передано 16,5 тыс. снимков камеры марсианской станции и 550 снимков камер марсохода, проведено 15 анализов пород. Научные результаты дали дополнительные подтверждения гипотезы о том, что когда-то Марс был более «влажным и тёплым».
Sojourner исследует камни[править | править код]

Марсоход начал исследовать первый камень на третий сол. Камень получил название «Барнакл-Билл» (англ. Barnacle Bill). Изучение состава осуществлялось альфа-протон-рентгеновским спектрометром (APXS) в течение 10 часов. Были обнаружены все элементы за исключением водорода, который составляет менее 0,1 % от массы камня или грунта. «Барнакл Билл» оказался похож по составу на земные андезиты, что подтверждает большую вулканическую активность Марса в прошлом.
Следующим объектом для исследования стал камень, получивший название «Йоги». Камень напоминал голову медведя, поэтому был назван в честь героя мультипликационных фильмов медведя Йоги Биар (англ. Yogi Bear). Анализ c помощью APXS показал, что камень представляет собой кусок базальтовой породы, более примитивный по элементному составу, чем «Барнакл Билл». Форма и структура поверхности «Йоги» дают возможность предположить, что он принесён потоками воды.
Затем учёных привлёк своей беловатой окраской камень «Скуби-Ду» (Scubee-Doo), к нему был отправлен ровер с целью проверить, не покрыт ли камень осадочной коркой. На 18-й сол были успешно приняты результаты измерений «Скуби-Ду», а на 21-й сол закончен анализ данных по составу камня. Оказалось, что он сходен по составу с грунтом района посадки, но имеет повышенное содержание кальция и кремния по сравнению с изученными ранее камнями [11].
На следующем камне, «Моу» (Moe), было найдено несколько отметок на его поверхности, демонстрирующих ветровую эрозию.
В области, названной «Сад Камней» (Rock Garden), Sojourner столкнулся с дюнами в виде полумесяца, похожими на земные.
Места посадок космических аппаратов на Марсе[править | править код]

{kind=link}
{kind=link}
Примечания[править | править код]
- ↑ Первые шаги. Вокруг света (1 сентября 2001). Дата обращения: 12 июня 2017. Архивировано 15 июня 2017 года.
- ↑ Mark T. Lemmon. Surrounded by Mars (англ.). NASA (18 сентября 2001). Дата обращения: 12 июня 2017. Архивировано 3 марта 2018 года.
- ↑ Космическая лаборатория «Марс патфайндер». AstroNautica. Дата обращения: 12 июня 2017. Архивировано 23 июня 2017 года.
- ↑ Марсоход Opportunity нашёл следы пресной воды. Lenta.ru (10 июня 2013). Дата обращения: 12 июня 2017. Архивировано 12 апреля 2021 года.
- ↑ 1 2 «Mars Pathfinder» исследует Марс // Новости космонавтики : журнал. — 1997. — № 14.
- ↑ Rover Mission Overview & Objectives. Дата обращения: 27 сентября 2021. Архивировано 27 сентября 2021 года.
- ↑ Mars Pathfinder - Entry Descent and Landing (англ.). НАСА. Архивировано 1 июня 2012 года.
- ↑ CS 5523 Operating Systems — Mars Pathfinder (англ.). UTSA Visualization and Modeling Laboratory. Дата обращения: 7 мая 2012. Архивировано из оригинала 1 июня 2012 года.
- ↑ Mars Pathfinder // Новости космонавтики : журнал. — 1997. — № 18/19.
- ↑ Golombek, M. et. al. 1997. Overview of the Mars Pathfinder Mission and Assessment of Landing Site Predictions. Science. Science: 278. pp. 1743—1748
- ↑ Работа на поверхности Марса продолжается // Новости космонавтики : журнал. — 1997. — № 15.
Ссылки[править | править код]
- Страничка на сайте НАСА (англ.). Дата обращения: 7 мая 2012. Архивировано 18 мая 2012 года.
- Mars Pathfinder NASA/JPL Website Архивировано 18 мая 2012 года.
- Super-Resolution Stereo Pairs of «Twin Peaks»
- Mars Pathfinder Mission Profile. Архивировано из оригинала 29 сентября 2010 года. by NASA’s Solar System Exploration
- Ted Stryk’s Mars Pathfinder page. Архивировано из оригинала 5 октября 2007 года.
- «A Crawl On Mars» — Ted Stryk’s Sojourner rover page. Архивировано из оригинала 5 октября 2007 года.
| В библиографических каталогах |
|---|
Исследование Марса космическими аппаратами | |
|---|---|
| Пролётные | |
| Орбитальные | |
| Посадочные | |
| Марсоходы | |
| Марсолёты | |
| Запланированные |
|
| Предложенные | |
| Потерянные | |
| Отменённые | |
| См. также | |
Полужирным выделены действующие космические аппараты | |
Программа «Дискавери» | |
|---|---|
| Действующие | |
| Будущие | |
| Завершённые | |
| Предложенные | |