Марсианская научная лаборатория
Данные в этой статье приведены по состоянию на декабрь 2014 года. |
| «Марсианская научная лаборатория» | |
|---|---|
| Mars Science Laboratory | |
 Автопортрет «Кьюриосити» | |
| Заказчик |
|
| Производитель | Boeing, Lockheed Martin |
| Оператор | НАСА |
| Стартовая площадка |
|
| Ракета-носитель | «Атлас-5» 541 |
| Запуск | 26 ноября 2011, 15:02:00.211 UTC[2][3][4] |
| Длительность полёта | 254 земных суток |
| COSPAR ID | 2011-070A |
| SCN | 37936 |
| Технические характеристики | |
| Масса | 899 кг[5] (вес на Марсе эквивалентен 340 кг)[6] |
| Размеры | 3,1 × 2,7 × 2,1 м |
| Мощность | 125 Вт электрической энергии, около 100 Вт через 14 лет; примерно 2 кВт тепловой; примерно 2,5—2,7 кВт·ч/сол[7][8] |
| Источники питания | РИТЭГ (использует радиоактивный распад 238Pu) |
| Движитель | 4 см/с[9] |
| Срок активного существования | Планируемый: 668 сол (686 дней) Текущий: 4281 день с момента посадки |
| Элементы орбиты | |
| Посадка на небесное тело | 6 августа 2012, 05:17:57.3 UTC SCET |
| Координаты посадки | Кратер Гейла, 4°35′31″ ю. ш. 137°26′25″ в. д. / 4,59194° ю. ш. 137,44028° в. д.G |
| Целевая аппаратура | |
| Скорость передачи |
до 32 кбит/с напрямую на Землю, до 256 кбит/с на Odyssey, до 2 Мбит/с на MRO[10] |
| Бортовая память | 256 МБ[11] |
| Разрешение изображения | 2 Мп |
| Логотип миссии | |
|
|
|
| mars.jpl.nasa.gov/msl/ | |
«Марсианская научная лаборатория» (МНЛ) (англ. Mars Science Laboratory, сокр. MSL) — программа НАСА, в ходе выполнения которой на Марс успешно доставлен и эксплуатируется марсоход третьего поколения «Кьюрио́сити». Марсоход представляет собой автономную химическую лабораторию в несколько раз больше и тяжелее предыдущих марсоходов «Спирит» и «Оппортьюнити»[2][4]. Аппарат должен будет за несколько месяцев пройти от 5 до 20 километров и провести полноценный анализ марсианских почв и компонентов атмосферы. Для выполнения контролируемой и более точной посадки использовались вспомогательные ракетные двигатели[12].
Запуск «Кьюриосити» к Марсу состоялся 26 ноября 2011 года,[13] мягкая посадка на поверхность Марса — 6 августа 2012 года. Предполагаемый срок службы на Марсе — один марсианский год (686 земных суток). С августа 2012 года по 7 октября 2023 года он прошёл 31,05 км[14].
MSL — часть долговременной программы НАСА по исследованию Марса роботизированными зондами Mars Exploration Program. В проекте, помимо НАСА, участвуют также Калифорнийский технологический институт и Лаборатория реактивного движения. Руководитель проекта — Дуг Маккистион (Doug McCuistion), сотрудник НАСА из отдела изучения других планет[15]. Полная стоимость проекта MSL составляет примерно 2,5 миллиарда долларов[16].
Специалисты американского космического агентства НАСА решили отправить марсоход в кратер Гейла[3][17]. В огромной воронке хорошо просматриваются глубинные слои марсианского грунта, раскрывающие геологическую историю красной планеты[18].
Название «Кьюриосити» выбрано в 2009 году из вариантов, предложенных школьниками, путём голосования в сети Интернет[19][20]. Среди других вариантов Adventure («Приключение»), Amelia («Амелия»), Journey («Путешествие»), Perception («Восприятие»), Pursuit («Стремление»), Sunrise («Восход»), Vision («Ви́дение»), Wonder («Чудо»).
Девятнадцатый марсианский аппарат НАСА, начиная с потерянной при запуске в 1964 году межпланетной станции Mariner 3.
История[править | править код]

В апреле 2004 года НАСА начало отбор предложений по оснащению нового марсохода научным оборудованием, и 14 декабря 2004 года было принято решение об отборе восьми предложений. В конце того же года началась разработка и испытания составных частей системы, включая разработку однокомпонентного двигателя производства компании Aerojet, который способен выдавать тягу в диапазоне от 15 до 100 % от максимальной при постоянном давлении наддува.
Создание всех компонентов марсохода завершилось к ноябрю 2008 года, причём большая часть приборов и программного обеспечения MSL продолжало испытываться. Перерасход бюджета программы составил около 400 миллионов долларов. В следующем месяце НАСА отложило запуск MSL на конец 2011 года из-за недостатка времени для испытаний.
С 23 по 29 марта 2009 года на сайте НАСА проводилось голосование по выбору названия для марсохода, на выбор было дано 9 слов[19]. 27 мая 2009 года победителем было объявлено слово «Кьюриосити» которое предложила шестиклассница из Канзаса Клара Ма[20][21].
Марсоход был запущен ракетой «Атлас-5» с мыса Канаверал 26 ноября 2011 года. 11 января 2012 года проведён специальный манёвр, который эксперты называют «самым важным» для марсохода. В результате совершённого манёвра аппарат взял курс, который привёл его в оптимальную точку для десантирования на поверхность Марса.
28 июля 2012 года проведена четвёртая небольшая коррекция траектории, двигатели включили всего на шесть секунд. Операция прошла настолько успешно, что окончательная коррекция, изначально намеченная на 3 августа, не потребовалась[22].
Посадка прошла успешно 6 августа 2012 года, в 05:17 UTC[23]. Радиосигнал, сообщающий об успешной посадке марсохода на поверхность Марса, достиг Земли в 05:32 UTC[24].
Задачи и цели миссии[править | править код]

Четыре основных цели MSL:[25]
- установить, существовали ли когда-либо условия, подходящие для существования жизни на Марсе;
- получить подробные сведения о климате Марса;
- получить подробные сведения о геологии Марса;
- провести подготовку к высадке человека на Марсе.
Для достижения этих целей поставлено шесть основных задач для MSL:[26][27]
- определить минералогический состав марсианских почв и припочвенных геологических материалов;
- попытаться обнаружить следы возможного протекания биологических процессов — по элементам, являющимся основой жизни, какой она известна землянам: (углерод, водород, азот, кислород, фосфор, серу);
- установить процессы, в которых формировались марсианские камни и почвы;
- оценить процесс эволюции марсианской атмосферы в долгосрочном периоде;
- определить текущее состояние, распределение и круговорот воды и углекислого газа;
- установить спектр радиоактивного излучения поверхности Марса.
Также в рамках исследований измерялось воздействие космической радиации на компоненты АМС во время перелёта к Марсу. Эти данные помогут оценить уровни радиации, ожидающие людей в пилотируемой экспедиции на Марс.[28][29]
Состав[править | править код]
| Перелётный модуль |
 |
Модуль управляет траекторией Mars Science Laboratory во время полёта с Земли на Марс. Также включает в себя компоненты для поддержки связи во время полёта и обеспечения теплового режима. Перед входом в атмосферу Марса происходит разделение перелётного модуля и спускаемого аппарата. |
| Тыльная часть капсулы |
 |
Капсула необходима для спуска через атмосферу. Она защищает марсоход от влияния космического пространства и перегрузок во время входа в атмосферу Марса. В тыльной части находится контейнер для парашюта. Рядом с контейнером установлено несколько антенн связи. |
| «Небесный кран» |  |
После того, как теплозащитный экран и тыльная часть капсулы выполнят свою задачу, они расстыковываются, тем самым освобождая путь для спуска аппарата и позволяя радару определить место посадки. После расстыковки кран обеспечивает точный и плавный спуск марсохода на поверхность Марса, который достигается за счёт использования реактивных двигателей и контролируется с помощью радиолокатора на марсоходе. |
| Марсоход «Кьюриосити» |  |
Марсоход под названием «Кьюриосити», содержит все научные приборы, а также важные системы связи и энергоснабжения. Во время полёта шасси складывается для экономии места. |
| Лобовая часть капсулы с теплозащитным экраном |
 |
Теплозащитный экран защищает марсоход от крайне высокой температуры, воздействующей на спускаемый аппарат при торможении в атмосфере Марса. |
| Спускаемый аппарат |  |
Масса спускаемого аппарата (изображён в сборе с перелётным модулем) составляет 3,3 тонны. Спускаемый аппарат служит для контролируемого безопасного снижения марсохода при торможении в марсианской атмосфере и мягкой посадки марсохода на поверхность. |
Технология полёта и посадки[править | править код]
Перелётный модуль[править | править код]

Траекторию движения Mars Science Laboratory от Земли до Марса контролировал перелётный модуль, соединённый с капсулой. Силовым элементом конструкции перелётного модуля является кольцевая ферма диаметром 4 метра[30], из алюминиевого сплава, укреплённая несколькими стабилизирующими стойками. На поверхности перелётного модуля установлены 12 панелей солнечных батарей, подключённых к системе энергоснабжения. К концу полёта, перед входом капсулы в атмосферу Марса, они вырабатывали около 1 кВт электрической энергии с КПД порядка 28,5 %[31]. Для проведения энергоемких операций предусмотрены литий-ионные аккумуляторы[32]. Кроме того, система электропитания перелётного модуля, батареи спускаемого модуля и энергосистема «Кьюриосити» имели взаимные соединения, что позволяло перенаправить потоки энергии в случае возникновения неисправностей[33].
Ориентация космического аппарата в пространстве определялась при помощи звёздного датчика и одного из двух солнечных датчиков[34]. Звёздный датчик наблюдал за несколькими выбранными для навигации звёздами; солнечный датчик использовал в качестве опорной точки Солнце. Эта система спроектирована с резервированием для повышения надёжности миссии. Для коррекции траектории применялись 8 двигателей, работающих на гидразине, запас которого содержался в двух сферических титановых баках[32].
Радиоизотопный термоэлектрический генератор (РИТЭГ) «Кьюриосити» постоянно выделял большое количество тепла, поэтому во избежание перегрева капсулы он должен был находиться на удалении от её внутренних стенок. Некоторые другие компоненты (в частности, аккумуляторная батарея) также нагревалась в процессе работы и требовали отвода тепла. Для этого капсула снабжена десятью радиаторами, переизлучавшими тепло в открытый космос; система трубопроводов и насосов обеспечивала циркуляцию теплоносителя между радиаторами и охлаждаемыми приборами. Автоматическое управление системой охлаждения осуществлялось при помощи нескольких датчиков температуры[32].
Перелётный модуль не имеет собственных систем связи, однако на нём установлена антенна среднего усиления («Medium Gain Antenna», MGA), которая присоединена к передатчику спускаемого модуля[34]. Бо́льшая часть связи во время полёта, а также на первом этапе посадки проводится с помощью неё. MGA имеет высокую направленность, и для достижения хорошего качества связи требуется её ориентация в направлении Земли[34]. Применение направленной антенны позволяет достичь более высокой скорости передачи данных при такой же мощности передатчика, по сравнению с простой всенаправленной антенной, такой как PLGA. При оптимальной ориентации антенны усиление составляет около 18 децибел, через неё могут передаваться сигналы с левой или правой поляризацией[34]. Передача идет на частоте 8401 МГц, скорость передачи данных — до 10 кбит/с. Приём происходит со скоростью 1,1 кбит/с на частоте 7151 МГц[34].
Капсула[править | править код]



Капсула производства Lockheed Martin массой 731 кг защищала «Кьюриосити» от влияния космического пространства, а также от воздействия атмосферы Марса при торможении. Кроме того, в капсуле размещался тормозной парашют. На куполе парашюта было размещено несколько антенн для поддержания связи.
Капсула состояла из двух частей — лобовой и тыльной. Капсула сделана из углепластика с алюминиевыми подпорками для придания прочности.
Контроль траектории и совершение манёвров во время входа в марсианскую атмосферу осуществляли восемь небольших двигателей, выпускающих газ. Двигатели развивали тягу около 267 Н и использовались только для изменения вращения и ориентации капсулы. Эти двигатели не участвовали в торможении.
В тыльной части капсулы размещён контейнер для парашюта, замедлившего спуск в атмосфере. Диаметр парашюта — примерно 16 м, он закреплён на 80 стропах и имеет длину свыше 50 метров. Создаваемое тормозное усилие — 289 кН.
На лобовой части капсулы размещён теплозащитный экран, защищавший марсоход от воздействия высоких температур (до 2000 °C)[35][36] при снижении в атмосфере Марса. Диаметр теплозащитного экрана — 4,57 м. Это самый большой теплозащитный экран, когда-либо изготовленный для исследовательской миссии. Экран сделан из углеродных волокон, пропитанных фенолформальдегидной смолой (PICA), подобно использованному в миссии «Стардаст». Экран способен выдержать тепловую нагрузку до 216 Вт/см², деформацию до 540 Па и давление около 37 кПа.[37]
Семь датчиков давления и температуры, предназначены для сбора высокоточных данных о нагрузках на теплозащитный экран. Эти данные имеют большое значение для проектировщиков: с их помощью в конструкцию будущих теплозащитных экранов могут быть внесены изменения.[37] Тем не менее, экран был оптимизирован именно для земной атмосферы,[источник не указан 4260 дней] а не для марсианской (последняя в 100 раз разреженней и на 95 % состоит из углекислого газа).[источник не указан 4260 дней] Необходимая толщина экрана для безопасного входа в атмосферу была неизвестна.[37] По результатам моделирования и в целях безопасности миссии толщину сделали с запасом, однако толщина повышает массу и снижает полезную нагрузку. Результаты применения теплозащитного экрана в составе MSL позволят уменьшить толщину экрана для применения в будущих марсианских миссиях.[37]
Капсула закреплена на перелётном модуле, не имевшем собственных систем связи. На вершине контейнера с парашютом в капсуле размещено несколько антенн. В X-диапазоне используются две антенны — широконаправленная парашютная антенна (PLGA) и наклонная широконаправленная антенна (TlGa), которые необходимы для связи во время полёта. Антенны отличаются только расположением, при этом каждая из них действовала в «слепом» секторе другой антенны. Коэффициент усиления антенн составляет от 1 до 5 дБ, при этом контейнер парашюта существенно влияет на распространение сигнала, вызывая его отражение. В начале полёта (на незначительном удалении от Земли) данные передавались со скоростью 1,1 кбит/с, скорость приёма данных достигала 11 кбит/с.[источник не указан 4260 дней] С увеличением расстояния скорость передачи данных постепенно снизилась до нескольких десятков бит в секунду.[источник не указан 4260 дней]
Во время посадки связь в дециметровом диапазоне длин волн осуществлялась через широконаправленную парашютную антенну (PUHF), состоящую из восьми небольших антенн, закреплённых на стенках контейнера, в котором сложен парашют[38]. В результате PLGA и TlGa очень стабильны по сравнению со всенаправленной и приёмной антеннами — информация может быть передана в экстремальных условиях полёта даже при большой скорости. Эта конструкция ранее успешно использована в «Фениксе». Коэффициент усиления антенны составляет от −5 до +5 дБ, а скорость передачи данных — не менее 8 кбит/с.
«Небесный кран»[править | править код]

После отделения парашюта на высоте порядка 1800 м дальнейший спуск осуществляется с помощью восьми реактивных двигателей. Их конструкция подобна тормозным двигателям, применявшимся в программе «Викинг», однако используемые материалы и системы управления были усовершенствованы. Каждый из двигателей создаёт тягу от 0,4 до 3,1 кН, удельный импульс 2167 Н·с/кг. Кроме того, имеется специальный маломощный режим (1 % от максимального потребления топлива), использующийся для разогрева двигателей и улучшения их времени реакции. Расход топлива составляет в среднем 4 кг в секунду при запасе в 390 кг. Для энергоснабжения на этом этапе использовались две литий-железо-сульфидных батареи.[39]
Для регулировки скорости и замера расстояния до поверхности используется радиолокационная система «Terminal Descent Sensor» (TDS), установленная на специальных штангах. Она вступает в действие на высоте 4 км и на скоростях ниже 200 м/с. Система работает в Ka-диапазоне (36 ГГц) и излучает сигналы в 12 Вт через шесть небольших антенн, каждая из которых имеет угол раскрытия 3°. Благодаря их расположению навигационная система получает точные данные о движении по всем трем осям, что очень важно для использования «небесного крана». Система весит 25 кг и потребляет 120 Вт энергии во время активной работы.[39]
«Небесный кран» — наиболее тяжёлая часть всего спускаемого аппарата. Он включился в работу примерно в 20 метрах от поверхности и спустил «Кьюриосити» на нейлоновых тросах c восьмиметровой высоты подобно крану. Этот способ спуска сложнее, чем подушки безопасности, использовавшиеся предыдущими марсоходами, которые предназначались для пересечённой местности и значительного снижения удара (скорость касания: 0,75 м/с у MSL, около 12 м/с в миссиях MER, 29 м/с у зонда «Бигль-2»). Вертикальная скорость «Кьюриосити» при посадке настолько мала, что его шасси может полностью поглотить силу удара; таким образом, никаких дополнительных амортизирующих устройств не требуется — в отличие от, например, аппаратов «Викинг-1» и «Викинг-2», использовавших посадочные опоры с встроенными сотовыми амортизаторами из алюминия, которые сминаются при посадке, поглощая ударную нагрузку. При мягкой посадке марсоход использовал датчики давления, чтобы определить момент отстрела тросов: информация с этих датчиков позволяла определить, находится ли «Кьюриосити» на поверхности полностью или частично (не всеми колёсами). Когда марсоход оказался на поверхности Марса, тросы и кабель отсоединились, и «небесный кран», увеличив мощность двигателей, улетел на расстояние 650 метров от марсохода для совершения жёсткой посадки. Процесс снижения марсохода на тросах занял 13 секунд.
На этапе спуска у марсохода имеется только одна система связи — «Small Deep Space Transponder» (SDSt), передатчик, работающий в Х-диапазоне (8—12 ГГц). Это усовершенствованная система, которая уже использовалась в Mars Exploration Rover.[34] Два основных усовершенствования: улучшение стабильности сигнала при изменениях температур и меньшее просачивание спектральных составляющих[34]. SDSt отвечает за связь в течение всего полёта и посадки на поверхность Марса. На марсоходе установлена идентичная антенна, которая, однако, начинает работу только после посадки. Принимаются сигналы с уровнем от −70 дБм, пропускная способность зависит от силы сигнала и регулировки (от 20 до 120 герц)[34]. Скорость передачи данных настраивается автоматически, в зависимости от качества сигнала, в пределах от 8 до 4000 бит/с[34] Система весит 3 кг и потребляет 15 Вт электроэнергии.
Поскольку сигналы SDSt являются слабыми, для их усиления используется «Traveling Wave Tube Amplifier» (TWTA), ключевым элементом которого является лампа бегущей волны. Используется модифицированный версия ЛБВ, установленной на MRO. TWTA потребляет до 175 Вт электрической мощности, мощность радиосигнала — до 105 Вт. Система защищена от низких и высоких напряжений и весит 2,5 кг[34]
На последнем этапе посадки, после отделения от капсулы, связь с наземной станцией обеспечивает «Descent Low Gain Antenna» (DLGA). Представляет собой открытый волновод, используемый в качестве антенны. Ранее через этот волновод осуществлялась передача сигнала от спускаемого аппарата к предыдущим ступеням. Коэффициент усиления антенны варьируется от 5 до 8 дБ, так как сигнал подвержен отражениям и интерференции от ближайших элементов конструкции. Вес такой антенны составляет 0,45 кг[34].
После отделения капсулы теряется контакт между системой UHF-связи и PUHF антенной, и на их замену приходит «Descent UHF Antenna» (DUHF), которая продолжает передавать данные на этой частоте.[34] Усиление этой антенны также сильно подвержено вариациям из-за отражений и интерференции от окружающих структур и находится в диапазоне от −15 до +15 дБ[34].
Космический аппарат[править | править код]






Масса космического аппарата на старте составляла 3839 кг, масса марсохода — 899 кг[5], масса спускаемого аппарата — 2401 кг (включая 390 кг топлива для мягкой посадки); вес перелётного модуля, необходимого для полёта к Марсу — 539 кг.
| Основные составляющие | Компонент | Вес | Дополнение |
|---|---|---|---|
| Перелётный модуль | 539 кг | из которого 70 кг топливо | |
| Спускаемый аппарат | Теплозащитный экран | 382 кг | |
| Капсула | 349 кг | ||
| «Небесный кран» | 829 кг | ||
| Топливо | 390 кг | ||
| Всего | 2489 кг | ||
| Марсоход «Кьюриосити» | 899 кг | ||
| Вся масса | 3388 кг |
Научные приборы[править | править код]
Приборы MSL:



.jpg)


.jpg)

- Камеры: MastCam, MAHLI, MARDI — три камеры разработаны компанией Malin Space Science Systems, камеры используют одинаковые компоненты, в том числе модуль обработки изображений, светочувствительные элементы (ПЗС-матрицы 1600 × 1200 пикселей), RGB фильтры Байера[40][41][42][43][44][45].
- 1. MastCam: Система состоит из двух камер и содержит множество спектральных фильтров.[41] Возможно получение снимков в естественных цветах размером 1600 × 1200 пикселей. Видео с разрешением 720p (1280 × 720) снимается с частотой до 10 кадров в секунду и аппаратно сжимается. Первая камера — Medium Angle Camera (MAC), имеет фокусное расстояние 34 мм и 15-градусное поле зрения, 1 пиксель равен 22 см на расстоянии 1 км. Вторая камера — Narrow Angle Camera (NAC), имеет фокусное расстояние 100 мм, 5,1-градусное поле зрения, 1 пиксель равен 7,4 см на расстоянии 1 км[41] Каждая камера имеет по 8 ГБ флеш-памяти, которая способна хранить более 5500 необработанных изображений; имеется поддержка JPEG-сжатия и сжатия без потери качества.[41] В камерах есть функция автоматической фокусировки, которая позволяет им сфокусироваться на объектах, находящихся на расстоянии от 2,1 м до бесконечности.[44] Несмотря на наличие у производителя конфигурации с трансфокатором, камеры не имеют увеличения, поскольку времени для испытания не оставалось. Каждая камера имеет встроенный фильтр Байера RGB и по 8 переключаемых ИК-фильтров. По сравнению с панорамной камерой, которая стоит на «Спирите» и «Оппортьюнити» (MER) и получает чёрно-белые изображения размером 1024 × 1024 пикселя, камера MAC MastCam имеет угловое разрешение в 1,25 раза выше, а камера NAC MastCam — в 3,67 раза выше.[44]
- 2. Mars Hand Lens Imager (MAHLI): система состоит из камеры, закреплённой на роботизированной «руке» марсохода, используется для получения микроскопических изображений горных пород и грунта. MAHLI может снять изображение размером 1600 × 1200 пикселей и с разрешением до 14,5 мкм на пиксель. MAHLI имеет фокусное расстояние от 18,3 до 21,3 мм и поле зрения от 33,8 до 38,5 градусов. MAHLI имеет как белую, так и ультрафиолетовую светодиодную подсветку для работы в темноте или с использованием флуоресцентной подсветки. Ультрафиолетовая подсветка необходима для стимуляции излучения карбонатных и эвапоритных минералов, наличие которых позволяет говорить о том, что в формировании поверхности Марса принимала участие вода. MAHLI фокусируется на объектах от 1 мм. Система может сделать несколько изображений с акцентом на обработку снимка. MAHLI может сохранить необработанное фото без потери качества или же сделать сжатие JPEG-файла.
- 3. MSL Mars Descent Imager (MARDI): во время спуска на поверхность Марса MARDI передавал цветное изображение размером 1600 × 1200 пикселей со временем экспозиции в 1,3 мс, камера начала съёмку с расстояния 3,7 км и закончила на расстоянии 5 метров от поверхности Марса, снимала цветное изображение с частотой 5 кадров в секунду, съёмка продлилась около двух минут. 1 пиксель равен 1,5 метра на расстоянии 2 км, и 1,5 мм на расстоянии 2 метра, угол обзора камеры — 90 градусов. MARDI содержит 8 Гб встроенной памяти, которая может хранить более 4000 фотографий. Снимки с камеры позволили увидеть окружающий рельеф на месте посадки.[46] JunoCam, построенная для космического аппарата Juno, основана на технологии MARDI.
- ChemCam: ChemCam представляет собой набор приборов дистанционного исследования, в том числе Laser-Induced Breakdown Spectroscopy (LIBS) и Remote Micro-Imager (RMI). LIBS генерирует 50—75 импульсов 1067-нм инфракрасного лазера длительностью 5 наносекунд, фокусируемого на скале, находящейся на расстоянии до 7 метров. Прибор анализирует спектр света, излучаемого испаряемой породой, и может обнаружить светимость шаров плазмы в видимом, ультрафиолетовом и около-инфракрасном диапазонах (240—800 нм).
- RMI использует ту же оптику, что и прибор LIBS. RMI исследует 1-мм объекты на расстоянии 10 м, поле зрения составляет 20 см на таком расстоянии. ChemCam разработан в Лос-Аламосской национальной лаборатории и французской лаборатории CESR.
- Разрешающая способность оборудования в 5—10 раз выше, чем у установленного на предыдущие марсоходы. С 7 метров ChemCam может определить тип изучаемой породы (например, вулканическая или осадочная), структуру грунта и камней, отследить преобладающие элементы, распознать лед и минералы с водными молекулами в кристаллической структуре, измерить следы эрозии на камнях и визуально помочь при исследовании пород манипулятором.
- Стоимость ChemCam для НАСА составила около $ 10 млн, в том числе перерасход около $ 1,5 млн. Прибор был разработан Лос-Аламосской национальной лабораторией совместно с французской лабораторией CSR. Разработка была завершена, а оборудование было готово к доставке в JPL в феврале 2008 года.
- Alpha-particle X-ray spectrometer (APXS): это устройство облучает образцы альфа-частицами и сопоставлять спектры в рентгеновских лучах для определения элементного состава породы. APXS является формой Particle-Induced X-ray Emission (PIXE), который ранее использовался в Mars Pathfinder и Mars Exploration Rovers. APXS разработан Канадским космическим агентством. MacDonald Dettwiler (MDA) — Аэрокосмическая канадская компания, которая строит Canadarm и RADARSAT, несут ответственность за проектирование и строительство APXS. Команда по разработке APXS включает в себя членов из Университета Гвельфов, Университета Нью-Брансуик, Университета Западного Онтарио, НАСА, Университета Калифорнии, Сан-Диего и Корнеллского университета. Источник альфа-излучения на основе изотопа кюрия-244 изготовлен российским ГНЦ НИИАР, как и для других американских марсоходов.[47][48][49][50]
- Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA): CHIMRA представляет собой ковш 4х7 сантиметров, который зачерпывает грунт. Во внутренних полостях CHIMRA он просеивается через сито с ячейкой 150 микрон, чему помогает работа вибромеханизма, лишнее удаляется, а на просеивание отправляется следующая порция. Всего проходит три этапа забора из ковша и просеивания грунта. В результате остается немного порошка необходимой фракции, который и отправляется в грунтоприёмник на теле марсохода, а лишнее выбрасывается. В итоге из всего ковша на анализ поступает слой грунта в 1 мм. Подготовленный порошок изучают приборы CheMin и SAM.
- CheMin: Chemin исследует химический и минералогический состав, с помощью рентгеновского флуоресцентного прибора и рентгеновской дифракции. CheMin является одним из четырёх спектрометров. CheMin позволяет определить обилие полезных ископаемых на Марсе. Прибор разработан Дэвидом Блейком в Ames Research Center НАСА и Jet Propulsion Laboratory НАСА. Марсоход бурит горные породы, а полученный порошок собирает прибор. Затем рентгеновские лучи направляются на порошок, внутренняя кристаллическая структура полезных ископаемых отразится на дифракционной картине лучей. Дифракция рентгеновских лучей различна для разных минералов, поэтому картина дифракции позволит учёным определить структуру вещества. Информацию о светимости атомов и дифракционную картину снимает специально подготовленная E2V CCD-224 матрица размером 600х600 пикселей. У «Кьюриосити» имеется 27 ячеек для анализа образцов, после изучения одного образца ячейка может быть переиспользована, но анализ, проводимый над ней, будет иметь меньшую точность из-за загрязнения предыдущим образцом. Таким образом, у марсохода есть всего 27 попыток для полноценного изучения образцов. Ещё 5 запаянных ячеек хранят образцы с Земли[51]. Они нужны, чтобы проверить работоспособность прибора в марсианских условиях. Для работы прибора нужна температура −60 градусов Цельсия, иначе будут мешать помехи от прибора DAN.
- Sample Analysis at Mars (SAM): набор приборов SAM анализирует твёрдые образцы, органические вещества и состав атмосферы. Прибор разработан: Goddard Space Flight Center, лабораторией Inter-Universitaire, французскими CNRS и Honeybee Robotics, наряду со многими другими партнёрами.
- Radiation assessment detector (RAD), «Детектор оценки радиации»: этот прибор собирает данные для оценки уровня радиационного фона, который будет воздействовать на участников будущих экспедиций к Марсу. RAD был включен первым, ещё на околоземной орбите, и фиксировал радиационный фон внутри аппарата — а затем и внутри марсохода во время его работы на поверхности Марса. Он собирает данные об интенсивности облучения двух типов: высокоэнергетических галактических лучей и частиц, испускаемых Солнцем. RAD был разработан в Германии Юго-западным исследовательским институтом (SwRI) внеземной физики в группе Christian-Albrechts-Universität zu Kiel при финансовой поддержке управления Exploration Systems Mission в штаб-квартире НАСА и Германии.
- Dynamic Albedo of Neutrons (DAN), «Динамическое альбедо нейтронов» (ДАН): используется для обнаружения водорода, водяного льда вблизи поверхности Марса, предоставлен Федеральным космическим агентством (Роскосмосом). Является совместной разработкой НИИ автоматики им. Н. Л. Духова при «Росатоме» (импульсный нейтронный генератор), Института космических исследований РАН (блок детектирования) и Объединённого института ядерных исследований (калибровка).[52][53] Стоимость разработки прибора составила около 100 млн рублей. Фото прибора. В состав прибора входят импульсный источник нейтронов и приёмник нейтронного излучения. Генератор испускает в сторону марсианской поверхности короткие, мощные импульсы нейтронов. Продолжительность импульса составляет около 1 мкс, мощность потока — до 10 млн нейтронов с энергией 14 МэВ за один импульс. Частицы проникают в грунт Марса на глубину до 1 м, где взаимодействуют с ядрами основных породообразующих элементов, в результате чего замедляются и частично поглощаются. Оставшаяся часть нейтронов отражается и регистрируется приёмником. Точные измерения возможны до глубины 50— 70 см. Помимо активного обследования поверхности Красной планеты, прибор способен вести наблюдение естественного радиационного фона поверхности (пассивное обследование).[54]. В конце 2015 года прибор получил награду от NASA.[55][56]
- Rover environmental monitoring station (REMS): является метеорологической станцией. REMS измеряет влажность, давление, температуру, скорость ветра и ультрафиолетовое излучение. Все датчики расположены в трёх местах: два горизонтальных штыря присоединены к Remote Sensing Mast (RSM), датчик ультрафиолетового излучения Ultraviolet Sensor (UVS) находится на верхней поверхности марсохода. Блок управления Instrument Control Unit (ICU) находится внутри корпуса. REMS предоставлен Испанией и Финляндией. Ведущая организация — Центр Астробиологии в Мадриде (исследовательская группа во главе с Хавьером Гомес-Эльвира). Финский Метеорологический институт разработал датчики давления и влажности.
- MSL entry descent and landing instrumentation (MEDLI): основной целью MEDLI является изучение атмосферной среды. После замедления спускаемого аппарата с марсоходом в плотных слоях атмосферы теплозащитный экран отделился — в этот период были собраны необходимые данные о марсианской атмосфере. Эти данные будут использованы в будущих миссиях, дав возможность определить параметры атмосферы. Также их возможно использовать для изменения конструкции спускаемого аппарата в будущих миссиях на Марс. MEDLI состоит из трёх основных приборов: MEDLI Integrated Sensor Plugs (MISP), Mars Entry Atmospheric Data System (MEADS) и Sensor Support Electronics (SSE).
- Hazard avoidance cameras (Hazcams): марсоход имеет две пары чёрно-белых навигационных камер, расположенных по бокам аппарата. Они используются для избежания опасности во время передвижения марсохода и для безопасного наведения манипулятора на камни и почву. Камеры делают 3D-изображения (поле зрения каждой камеры — 120 градусов), составляют карту местности впереди марсохода. Составленные карты позволяют марсоходу избежать случайных столкновений и используются программным обеспечением аппарата для выбора необходимого пути преодоления препятствий.
- Navigation cameras (Navcams): для навигации марсоход использует пару чёрно-белых камер, которые установлены на мачте для слежения за передвижением марсохода. Камеры имеют 45-градусное поле зрения, делают 3D-изображения. Их разрешение позволяет видеть объект размером в 2 сантиметра с расстояния 25 метров.
Ракета-носитель[править | править код]

MSL запущена с стартового комплекса № 41 мыса Канаверал на ракете-носителе «Атлас-5 541» компании United Launch Alliance. Эта двухступенчатая ракета-носитель включает в себя центральный блок первой ступени диаметром 3,8 м с двигателем российского производства РД-180, разработанным в КБ НПО «Энергомаш». Имеет четыре твердотопливных блока и разгонный блок Центавр с головным обтекателем диаметром 5.4 м. Она способна выводить до 17 443 кг на низкую околоземную орбиту. «Атлас-5» также использовался для запуска Mars Reconnaissance Orbiter и New Horizons.[1]
Первая и вторая ступени вместе с твердотопливными двигателями были собраны 9 октября недалеко от стартового стола. Головной обтекатель с установленной MSL перевезён на стартовый стол 3 ноября. Запуск состоялся 26 ноября в 15:02 UTC 2011.
Перелёт[править | править код]
На протяжении перелёта Земля—Марс MSL записывал уровень радиации внутри станции с помощью детектора космического излучения RAD (Radiation Assessment Detector). За это время было зафиксировано пять вспышек солнечной активности, одна из которых принадлежала к наиболее мощному классу Х. На время посадки детектор RAD был отключён. «Кьюриосити» — первый из марсианских аппаратов, который был специально оснащён подобным детектором.
Вход в атмосферу, снижение и посадка[править | править код]




Мягкий спуск большой массы на поверхность Марса весьма затруднителен. Атмосфера слишком разрежённая, чтобы использовать лишь парашюты или аэродинамическое торможение,[57] и в то же время достаточно плотная, чтобы создать значительные проблемы со стабилизацией при использовании ракетных двигателей.[57] Некоторые предыдущие миссии использовали воздушные подушки на манер автомобильных подушек безопасности для смягчения удара при посадке, но MSL слишком тяжёлая для использования этого варианта.
«Кьюриосити» выполнил спуск на поверхность Марса, используя систему высокоточного входа в атмосферу, снижения и посадки (EDL), которая обеспечила мягкую посадку в пределах заданного эллипса посадки размером 20 км × 7 км,[58], в отличие от эллипса 150 км × 20 км систем посадки марсоходов Mars Exploration Rovers («Спирит» и «Оппортьюнити»).[59]
При посадке использовались 6 различных конфигураций спускаемого аппарата сработало 76 пиротехнических устройств. На одном из этапов использовался крупнейший созданный человечеством сверхзвуковой парашют.[60] Посадочная последовательность, состоящая из входа в атмосферу, снижения и посадки, была разделена на 4 части.[61]
Управляемый вход в атмосферу[править | править код]
Марсоход был сложен внутри аэродинамической капсулы, предохранявшей его во время космического перелёта и входа в атмосферу Марса. За 10 минут до входа в атмосферу от капсулы отсоединился перелётный модуль, который отвечал за питание, связь и разгон в процессе межпланетного полёта. Через минуту после этого при помощи двигателей, установленных на капсуле, было остановлено вращение (2 оборота в минуту) и произошла переориентация.[62] Вход в атмосферу выполнялся под защитой экрана с абляционным теплозащитным покрытием из углеродных волокон, пропитанных фенолформальдегидной смолой (PICA). Это теплозащитное покрытие диаметром 4,5 м — самое большое из когда-либо запущенных в космос[63]. Во время полета в капсуле под действием лобового сопротивления движение космического аппарата в марсианской атмосфере замедлилось со скорости межпланетного перелёта 5,8 км/с до приблизительно двукратной скорости звука в атмосфере Марса, при которой возможно раскрытие парашюта. Большая часть компенсации ошибки при посадке выполняется алгоритмом управляемого входа в атмосферу, похожим на применявшийся астронавтами, возвращавшимися на Землю в ходе программы Apollo.[62] Это управление использовало подъёмную силу, создаваемую аэродинамической капсулой, чтобы нивелировать любую обнаруженную ошибку по дальности и тем самым прибыть на выбранное место посадки. Чтобы аэродинамическая капсула обеспечивала подъёмную силу, её центр масс смещался от центральной оси, что вызывало наклон капсулы при атмосферном полёте, аналогично командному модулю Apollo. Это достигалось двумя сбрасываемыми вольфрамовыми балластами массой около 75 кг каждый.[62] Вектор подъёмной силы управлялся четырьмя парами двигателей реактивной системы управления, каждая пара создавала тягу около 500 Н. Способность изменять точку приложения подъёмной силы позволяла космическому аппарату реагировать на окружающую среду и маневрировать к зоне посадки. Перед раскрытием парашюта капсула сперва сбросила оставшиеся шесть вольфрамовых балластов массой около 25 кг каждый, чтобы устранить смещение центра тяжести.[62] Затем на высоте около 10 км при скорости 470 м/с раскрылся парашют.
Снижение под парашютом[править | править код]
Когда завершился этап входа в атмосферу и капсула замедлилась до двукратной скорости звука в атмосфере Марса (470 м/с), на высоте около 10 км раскрылся сверхзвуковой парашют,[59][64] как это выполнялось в предыдущих миссиях, таких как Viking, Mars Pathfinder и Mars Exploration Rovers. Затем был сброшен теплозащитный экран. В марте и апреле 2009 года парашют MSL был испытан в крупнейшей в мире аэродинамической трубе и прошёл лётные испытания. Парашют имеет 80 строп, длину более 50 м и диаметр около 16 м. Парашют имеет возможность раскрытия при скорости 2,2 М и способен создавать тормозное усилие до 289 кН в марсианской атмосфере.[64] На высоте ниже 3,7 км фотокамера, установленная на нижней поверхности марсохода, снимала примерно по 5 кадров в секунду (с разрешающей способностью 1600×1200 пикселей) в течение приблизительно двух минут — до подтверждения посадки марсохода на поверхность Марса.[65]
Снижение с использованием тяги двигателей[править | править код]
После торможения парашютом, на высоте около 1.8 км, двигаясь со скоростью около 100 м/с, марсоход и спускаемый аппарат отделился от капсулы с парашютом.[59] Спускаемый аппарат — это платформа над марсоходом с гидразиновыми монотопливными ракетными двигателями с переменной тягой, установленными на штангах, выступающих в стороны от платформы, для замедления снижения. Двигатели этого модуля были разработаны на основе двигателей, использовавшихся на посадочных модулях Viking (Mars Lander Engine).[66] Каждый из восьми двигателей создавал тягу до 3,1 кН.[67] В это время марсоход был переведён из перелётной конфигурации (сложенное состояние) в посадочную, при этом опускаясь на «небесном кране» под тяговой платформой.
Спуск «небесным краном»[править | править код]
Система «Небесный кран» (Sky crane) мягко опустила марсоход колёсами вниз на поверхность Марса. Система состояла из трёх тросов, опускающих марсоход, и электрического кабеля, связывающего тяговый модуль и исследовательский аппарат. Опустив марсоход примерно на 7,5 м ниже тягового модуля, система плавно остановилась, и марсоход коснулся поверхности[59][62][68][69].
Марсоход выждал 2 секунды,[источник не указан 4277 дней] необходимые для подтверждения того, что аппарат находится на твёрдой поверхности, для чего замерялась нагрузка на колёса. После этого марсоход пироножами срезал тросы и электрокабели. Освобождённая тяговая платформа, отлетев на расстояние около 650 метров, совершила жёсткую посадку[70], в то время как марсоход начал подготовку к работе на поверхности планеты. Такая система снижения и посадки с использованием реактивной тяги и «небесного крана» была применена впервые.
-
 Схема входа «Кьюриосити» в атмосферу Марса.
Схема входа «Кьюриосити» в атмосферу Марса. -
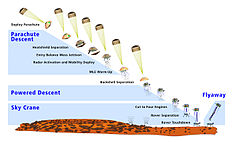 Схема посадки «Кьюриосити», парашютирование.
Схема посадки «Кьюриосити», парашютирование. -
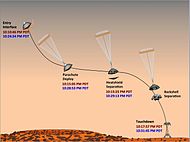 Хронология посадки «Кьюриосити». Красным цветом — реальное время, синим — время получения сигнала на Земле.
Хронология посадки «Кьюриосити». Красным цветом — реальное время, синим — время получения сигнала на Земле. -
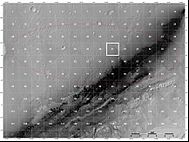 Место посадки «Кьюриосити» в Квадрате 51.
Место посадки «Кьюриосити» в Квадрате 51.




Марсоход совершил мягкую посадку в заданном районе Марса 6 августа 2012 года (сол 0) в 5:17:57.3 UTC (9:17:57.3 МСК, или 15:00:01 по неофициальному местному Марсианскому времени (LMST), используемому в НАСА), завершив свой межпланетный перелёт протяжённостью 567 млн км[71]. После посадки марсоход передал на Землю в низком разрешении первые снимки с поверхности Марса.
Трансляция посадки в прямом эфире велась на сайте НАСА. Через сервис ustream.tv за посадкой наблюдали более 200 000 зрителей. Снижение в атмосфере было заснято с орбиты Марсианским разведывательным спутником.
Группа ученых составила карту района, включающего кратер Гейла. Они разделили район на квадратные участки размером 1,3×1,3 км. Марсоход совершил мягкую посадку в квадрате 51, названном «Йéллоунайф» (англ. Yellowknife), внутри заданного эллипса посадки. 22 августа 2012 года участок поверхности, на который сел марсоход, назвали «Место посадки Брэдбери» (Bradbury Landing) в честь американского писателя Рэя Бредбери, автора «Марсианских хроник», ушедшего из жизни за два месяца до посадки марсохода.[72][73][74]
Ход выполнения миссии[править | править код]

2012 год[править | править код]
Испытания научного оборудования и путь в Гленелг (сол 1 — сол 63)[править | править код]
7 августа — сол 1 — марсоходом передана на Землю первая цветная фотография Марса, сделанная камерой MAHLI, а также серия из 297-ми цветных снимков низкого разрешения (192×144 пикселя), из которых был смонтирован видеоролик снижения и посадки марсохода. Эти снимки были сделаны во время снижения аппарата в кратер Гейла камерой MARDI, направленной вниз.

8 августа — сол 2 — навигационные камеры сделали первые снимки марсианского ландшафта.[75]
9 августа — сол 3 — марсоходом успешно развёрнута и направлена в сторону Земли антенна для связи, собраны данные о радиации и температуре. Также марсоходом передана на Землю серия из 130 изображений низкого разрешения (144×144 пикселя), из которых составлена первая панорама местности[76], окружающей марсоход. Руководитель исследовательских работ Калифорнийского технологического института Джон Гротцингер заявил, что пейзаж на снимках очень напоминает пустыню Мохаве в Калифорнии[77]. Российский нейтронный детектор DAN был впервые включён в пассивном режиме и успешно прошёл проверку. Была произведена калибровка главной камеры MASTCAM. Также были проверены следующие приборы: APXS (альфа-спектрометр), CheMin (химический анализатор) и SAМ.[источник не указан 4276 дней]

10 августа — сол 4 — подготовка к замене программного обеспечения с «посадочной» версии на «марсианскую», предназначенную для работы на поверхности планеты.[источник не указан 4276 дней]
11—14 августа — сол 5—8 — замена программного обеспечения. «Кьюриосити» отправил на Землю первые кадры окружающей среды в высоком разрешении (1200×1200 пикселей), сделанные камерой Mastcam,[78][79] а также новые высококачественные снимки, на которых видны следы древних рек. По снимкам, полученным при помощи камер аппарата и прибора HiRISE Марсианского разведывательного спутника, определено точное место посадки марсохода.


15 августа — сол 9 — испытание научных приборов (APXS, CheMin, DAN)[80].
17 августа — сол 11 — прибор DAN был включён в активном режиме, проработал в течение одного часа штатно без замечаний и был выключен по команде. Получена первая научная информация о составе вещества Марса и о радиационном фоне в районе посадки[81]. Начато испытание прибора REMS.
19 августа — сол 13 — первое использование прибора CheCam. Луч детектора с энергией 14 мДж тридцатью непродолжительными импульсами в течение 10 секунд воздействовал на свою первую цель — Камень № 165, находящийся на расстоянии примерно трёх метров от марсохода и получивший название Coronation (с англ. — «Коронация»). В точке попадания атомы камня превратились в светящуюся ионизированную плазму и стали излучать в световом диапазоне. Свет плазмы был воспринят ChemCam, который провёл спектрометрические замеры в трёх каналах: ультрафиолетовом, видимом фиолетовом, видимом и ближнем инфракрасном. Качество работы ChemCam превзошло все ожидания и оказалось даже выше, чем на Земле[82][83][84]. Успешно испытан манипулятор марсохода[85].
22 августа — сол 16 — первое движение марсохода. «Кьюриосити» проехал вперёд 4,5 метра, повернулся на 120 градусов и проехал назад 2,5 метра. Длительность поездки составила 16 минут[86].

29 августа — сол 22 — марсоход направился в район Гленелг, проехав 16 метров в восточном направлении. Кроме того, были получены первые цветные изображения камеры MastCam MAC в высоком разрешении (29000х7000 пикселей, мозаика из 130 изображений). Всего аппарат передал два снимка, на которых запечатлена гора Эолида (неоф. гора Шарпа) и панорама вокруг неё.
30 августа — сол 24 — марсоход проехал 21 метр по направлению к Гленелг[87].
5—12 сентября — сол 30—37 — марсоход сделал длительную остановку на пути в Гленелг и раскрыл свой манипулятор, чтобы испытать приборы, находящиеся на его турели. Место, где проводились испытания, было выбрано не случайно — во время проверки «Кьюриосити» должен был находиться под определённым углом по отношению к солнцу и стоять на ровной поверхности. Механическая «рука» длиной 2,1 метра сделала несколько движений и выполнила ряд действий. Испытание помогло учёным понять, как действует манипулятор в марсианской атмосфере после долгого космического путешествия в сравнении с аналогичными испытаниями, которые проводились ещё на Земле. Общее расстояние, пройденное марсоходом за месяц пребывания на Марсе, составило 109 метров, что составляет четверть расстояния от места посадки до района Гленелг[88][89].
14—19 сентября — сол 39—43 — марсоход проехал за эти дни 22, 37, 27, 32 и 31 метр соответственно. Общее расстояние, пройденное марсоходом с 5 августа, составило 290 метров. В сол 42 «Кьюриосити» с помощью MastCam «наблюдал» за частичным солнечным затмением, вызванным транзитом Фобоса по диску Солнца[90][91][92].
20 сентября — сол 44 — марсоход с помощью манипулятора приступил к исследованию куска породы в форме пирамиды размером 25 сантиметров в высоту и 45 сантиметров в ширину, названного «Джейк Матиевич» (англ. Jake Matijevic) в память о сотруднике NASA, который являлся руководителем миссий Sojourner, Spirit и Opportunity и скончавшегося 20 августа 2012 года. Кроме того, повторно были проверены приборы APXS и СhemCam[93].
24 сентября — сол 48 — марсоход закончил исследование камня «Jake Matijevic» и в тот же сол проехал 42 метра по направлению в Гленелг. Общее расстояние, пройденное марсоходом с 5 августа, составило 332 метра[94].
25 сентября — сол 49 — марсоход проехал 31 метр по направлению в Гленелг. Общее расстояние, пройденное марсоходом с 5 августа, составило 367 метров[95].
26 сентября — сол 50 — марсоход проехал 49 метров по направлению в Гленелг. Общее расстояние, пройденное марсоходом с 5 августа, составило 416 метров[96].
2 октября — сол 56 — общее расстояние, пройденное марсоходом с 5 августа, составило 484 метра[97]
7 октября — сол 61 — «Кьюриосити» впервые зачерпнул своим 7-сантиметровым ковшом грунт для проведения его исследования прибором CHIMRA.
Начало октября 2012 — обнародование сведений о результатах работы прибора SAM по поиску метана. Обнародование сведений о результатах работы прибора REMS за первые 40 дней работы марсохода.
2013 год[править | править код]
9 февраля — «Кьюриосити», начавший бурение поверхности Марса, добыл первую пробу твёрдой породы грунта[98].
4 июля — марсоход отправился к основанию горы Шарпа. За время своего путешествия, которое займет около года, марсоход преодолеет около 8 км пути, а также будет производить всесторонние изучения почвы, воздуха и радиоактивного фона планеты. Столь долгое время путешествия обусловлено несколькими причинами. Во-первых, на пути к горе Шарпа стоит множество массивов из песчаных дюн. Марсоход должен будет обходить их стороной, чтобы не увязнуть там навсегда, как это случилось с марсоходом «Спирит». Во-вторых, во время путешествия также могут обнаружиться интересные образцы марсианских пород, и тогда «Кьюриосити» отправят команду сделать остановку и проанализировать находки.
«Кьюриосити» обнаружил на Марсе следы древнего озера. Результаты исследований опубликованы 9 декабря в журнале Science (статья поступила в редакцию 4 июля 2013 года), их краткий обзор приводит Science World Report. Следы озера были найдены на участке Yellowknife Bay в кратере Гейла, где марсоход работает с августа 2012 года. Анализ осадочных пород на этом участке показал, что около 3,6 миллиарда лет назад в кратере Гейла существовало, по меньшей мере, одно озеро. Озеро предположительно было пресноводным и содержало ключевые химические элементы, необходимые для жизни: углерод, водород, кислород, азот и серу. Ученые предполагают, что в такой воде могли существовать простые бактерии, такие как хемолитоавтотрофные (то есть получающие энергию за счет окисления неорганических соединений и использующие углекислый газ как источник углерода). Исследователи, однако, обратили внимание на то, что никаких признаков жизни на Марсе пока обнаружено не было. По их словам, сегодня можно говорить только о том, что в кратере Гейла, возможно, существовало озеро, которое могло бы предоставить благоприятные условия для микроорганизмов[99].
2014 год[править | править код]
В сентябре 2014 года «Кьюриосити» достиг подножия горы Шарпа и приступил к её исследованию[100].
23 сентября он произвёл бурение, в последующие дни полученные образцы были подвергнуты анализу[101].
2017 год[править | править код]
С момента высадки «Кьюриосити» преодолел расстояние более 16 км и поднялся по склону горы Шарпа на 165 м.[102]
2018 год[править | править код]
После 18 месяцев бездействия бортовая лаборатория марсохода Curiosity вернулась в рабочее состояние благодаря работе инженеров из Лаборатории НАСА по изучению реактивного движения (NASA Jet Propulsion Laboratory, JPL), искавших решение проблемы практически в течение года. Инженеры «научили» марсоход использовать его не до конца исправную буровую установку новым способом, и теперь марсоход снова может собирать образцы марсианских пород и передавать их в свою бортовую лабораторию для проведения анализа[103].
Научные исследования[править | править код]
2012 год (сол 10 — сол)[править | править код]

16 и 17 августа, во время испытания прибора REMS, было впервые определено колебание суточных температур в районе посадки марсохода (южное полушарие красной планеты, 4,5 градус южной широты). Температурный диапазон поверхности составил от +3 °С до −91 °С, атмосферы в месте посадки — от −2 °С до −75 °С[104]. Диапазон колебаний атмосферного давления изменяется на 10—12 % (для сравнения — на Земле ежесуточные колебания атмосферного давления не превышают 1,2 %). Такие «качели» способны приводить даже разреженную атмосферу Марса в неистовство, что выражается в регулярных глобальных песчаных бурях. Кроме того, ученые при помощи метеорографа REMS обнаружили, что наступающая марсианская весна оказалось неожиданно теплой: примерно в половине случаев дневная температура была выше 0 °С, средняя температура составила приблизительно +6 °С в светлое время суток и −70 °С ночью[105].
В период 6 августа — 6 сентября, за который марсоход проехал более 100 метров, прибор DAN, работающий в активном режиме ежедневно по 15 минут, зафиксировал незначительное содержание воды в почве, порядка 1,5—2 %, что значительно меньше, чем ожидалось. Первоначально предполагалось, что массовая доля воды в грунте в районе кратера Гейла составляет 5—6,5 %[106][107].
18 сентября «Кьюриосити» с помощью MastCam «наблюдал» за частичным солнечным затмением, вызванным транзитом Фобоса по диску Солнца. Ученые полагают, что полученные снимки дадут понимание того, насколько сильно Марс «сжимается» и «растягивается» в результате действия приливных сил при приближении его спутников. Эти данные помогут выяснить, из каких пород состоит красная планета, и дополнят наши представления о том, как формировался Марс в далёком прошлом Солнечной системы[108].
27 сентября НАСА сообщило об обнаружении маросходом следов древнего ручья, тёкшего в районе исследования марсохода. Ученые обнаружили на снимках куски конгломерата, образованного сцементированными слоями гравия, образовавшегося на дне древнего ручья. Вода текла в нём со скоростью примерно 0,9 м/с, а глубина составляла около полуметра. Это первый случай находки такого рода донных отложений и первое значительное открытие «Кьюриосити»[109].
11 октября НАСА сообщило о результатах исследования камня Jake Matijevic, который марсоход исследовал в конце сентября. Химический анализ «Джейка» показал, что он богат щелочными металлами, что нетипично для марсианских пород. Судя по спектру, данный камень представляет собой «мозаику» из отдельных зерен минералов, в том числе пироксена, полевого шпата и оливина. Кроме того, спектрометр APXS зафиксировал необычно высокую концентрацию и других элементов в «Джейке», в том числе цинка, хлора, брома и других галогенов[110].
30 октября НАСА сообщило о результатах исследования минерального состава марсианского грунта. Исследования «Кьюриосити» показали, что почва Красной планеты состоит примерно из тех же зерен минералов, что и вулканический туф в окрестностях вулканов на Гавайских островах. Наполовину почва состоит из мелких кристаллов вулканических пород, львиную долю которых составляют полевой шпат, оливин и пироксен. Эти породы широко распространены на Земле в окрестностях вулканов и горных хребтов. Другая половина почвы состоит из аморфной материи, химический состав и структуру которой ученым ещё предстоит изучить. Минеральный состав почвы в целом соответствует представлениям о том, что поверхность Марса могла быть покрыта водой в далёком прошлом Красной планеты[111].
28 ноября на специализированной конференции в римском университете «Сапьенца» глава JPL Чарльз Элачи, отвечающей за исследовательскую миссию, заявил, что, по предварительным данным, на Красной планете обнаружены простые органические молекулы[112]. Но уже 29 ноября НАСА опровергло «слухи о прорывных открытиях»[113]. 3 декабря НАСА объявило, что прибор SAM зарегистрировал четыре хлорсодержащих органических соединения, однако у специалистов нет полной уверенности в их марсианском происхождении.
2013 год[править | править код]
9 февраля — аппарат «Кьюриосити», начавший бурение поверхности Марса (первое в истории исследований), добыл первую пробу твёрдой породы грунта[114].
12 марта 2013 при анализе материалов, полученных в ходе бурения, c помощью SAM и CheMin были обнаружены следы серы, азота, водорода, кислорода, фосфора и углерода[115][116].
2014 год[править | править код]
16 декабря — НАСА сообщило об обнаружении органических соединений и кратковременной вспышке концентрации метана в 10 раз во время исследований «Кьюриосити»[117][118].
2017 год[править | править код]
В сентябре 2017 года было сообщено о непосредственном обнаружении бора в почве в кратере Гейла с помощью прибора ChemCam путем лазерно-искровой эмиссионной спектрометрии. Зарегистрированное приборами излучение длиной волны между 249,75 и 249,84 нанометрами свидетельствовало о содержании бора в исследуемой породе[119][120].
Результаты[править | править код]
DAN. За первые 100 дней работы Curiosity ДАН произвел 120 измерений, как при движении марсохода, так и во время его остановок. Примерно половина измерений (58 сеансов) была сделана в активном режиме, половина — в пассивном. Результаты позволяют говорить о двухслойности марсианского грунта. У самой поверхности лежит сухой слой, толщиной 20 — 40 см, с содержанием воды, не превышающим 1 % по массе, под ним, на глубине до метра, находится грунт с относительно высоким содержанием воды, которое значительно изменяется вдоль трассы движения и в отдельных местах превышает 4 %. Возможно, что с глубиной влажность продолжает возрастать, но прибор ДАН не в состоянии получать данные с глубины более 1 м[54].
RAD. Радиационный детектор RAD был включен ещё на орбите Земли в ноябре 2011 года, его выключали на время посадки, а затем снова ввели в строй на поверхности. Первые результаты его работы были опубликованы ещё в августе 2012 года, однако полный анализ данных потребовал свыше 8 месяцев исследований. В конце мая 2013 года в журнале Science была опубликована статья американских ученых, анализировавших работу радиационного детектора RAD. По результатам исследований ученые пришли к выводу, что участники пилотируемого полета к Марсу получат потенциально смертельную дозу космической радиации: свыше 1 зиверта ионизирующего излучения, две трети из которого путешественники получат во время полета к Марсу (около 1,8 миллизиверта излучения в день)[121][122]. В начале декабря 2013 в журнале Science была опубликована статья американских ученых из Юго-Западного исследовательского института, в которой указывается, что за день организм человека или других живых существ будет накапливать около 0,21 миллизиверта ионизирующего излучения, что в десятки раз больше, чем аналогичные значения для Земли. Как отмечают авторы статьи, это значение всего в 2 раза меньше, чем уровень радиации в открытом космосе, измеренный во время полета Curiosity от Земли к Марсу. В общей сложности за год жизни на Марсе организм человека поглотит около 15 рентген ионизирующего излучения, что в 300 раз больше предельной годовой дозы для работников атомной промышленности. Это обстоятельство устанавливает предельный безопасный срок пребывания людей на Марсе без риска для здоровья в размере 500 дней[123]. Данные RAD были собраны во время пика 11-летнего цикла солнечной активности, в то время, когда поток галактических космических лучей относительно низкий (солнечная плазма обычно рассеивает галактические лучи). Кроме того, показания RAD позволяют предположить, что непосредственно на поверхности Марса поиск признаков жизни будет затруднительным, по некоторым данным подходящая глубина для поисков составляет около 1 метра. Тем не менее, детальное исследование показало, что, хотя сложные соединения вроде белков на глубине 5 см подвержены полному уничтожению за срок в несколько сотен миллионов лет, более простые соединения с атомной массой менее 100 а.е.м. могут сохраняться в таких условиях свыше 1 млрд лет и могут быть обнаружены MSL[124]. К тому же, по информации НАСА, некоторые участки поверхности Марса сильно изменились под действием эрозии. В частности, залив Йеллоунайф, где проходит часть миссии Curiosity, 80 млн лет назад был покрыт слоем породы толщиной 3 метра, а по краю находятся участки, обнажившиеся не более 1 млн лет назад, в результате чего верхний слой подвергался воздействию радиации относительно короткий промежуток времени[125].
Неисправности оборудования[править | править код]
21 августа 2012 года (сол 15) у марсохода обнаружилась первая неисправность: отказал один из двух датчиков ветра, позволяющих определять скорость и направление атмосферных потоков. Специалисты НАСА высказали мысль, что прибор повредили небольшие кусочки породы, поднятые с поверхности при посадке марсохода. Устранить неполадки не удалось. Тем не менее, марсоход сможет выполнять все необходимые измерения с помощью другого уцелевшего датчика[126].

09 октября 2012 года (сол 62) НАСА объявило об обнаружении рядом с марсоходом небольшого яркого предмета, который предположительно являлся фрагментом самого марсохода. В связи с этим было решено временно приостановить запланированные операции с грунтозаборным устройством для определения природы предмета и оценки возможного влияния происшествия на дальнейший ход миссии[127]. В течение всего сол 63 обнаруженный предмет подробно изучался с помощью CheCam. Специалисты НАСА пришли к выводу, что маленький блестящий кусочек представляет собой защитный экран, оберегавший электронные компоненты от повреждения во время полета и посадки аппарата. Он был приклеен к «Кьюриосити» при помощи клейкой субстанции, что сводит возможность физической поломки марсохода к минимуму. С другой стороны, в НАСА не исключают, что этот фрагмент является частью посадочного модуля, отвалившейся при спуске марсохода на поверхность Марса[128].
28 февраля 2013 года «Кьюриосити» в связи со сбоем во флеш-памяти компьютера был переведен на несколько дней в «безопасный режим»[129].
21 ноября 2013 года специалисты НАСА остановили работу «Кьюриосити» в связи с обнаружением отклонения напряжения в сети между шасси марсохода и бортовой 32-вольтной шиной питания, которое снизилось со штатных 11 вольт до 4 вольт[130]. 26 ноября марсоход вернулся к работе. Специалисты, занимавшиеся анализом возникшей ситуации, пришли к выводу, что причиной падения напряжения стало внутреннее замыкание в радиоизотопном термоэлектрическом генераторе марсохода (конструкция генератора допускает такие замыкания, и они не влияют на работоспособность марсохода)[131].

Помимо неисправностей собственно научных приборов и электроники марсохода, угрозу для миссии представляет естественный износ колёс, который по состоянию на середину 2018 года не вышел за рамки расчётных пределов.
Финансирование проекта[править | править код]
По состоянию на середину 2015 года, финансирование миссии «Кьюриосити» будет осуществляться до сентября 2016 года. К моменту истечения этого срока ученые, занятые в программе «Кьюриосити», подадут заявку в НАСА на продление миссии ещё на два года. Процесс планируется повторять до тех пор, пока марсоход будет оставаться работоспособным[132]
Факты[править | править код]
- Вскоре после запуска Mars Science Laboratory опередила другую миссию к Марсу — «Фобос-Грунт» (НПО им. Лавочкина, Роскосмос), — запуск которой был осуществлён 9 ноября 2011 года (МСК), а прибытие к Марсу планировалось на 1—2 месяца позднее, чем Mars Science Laboratory (АМС «Фобос-Грунт» не смогла выйти на межпланетную траекторию вследствие нештатной ситуации). При этом масса Mars Science Laboratory с разгонным блоком составляла более 23 тонн, в то время как масса АМС «Фобос-Грунт» с разгонным блоком составляла около 13 тонн. Больший разгон Mars Science Laboratory на межпланетной траектории объясняется главным образом возможностью аэродинамического торможения в атмосфере Марса на завершающем отрезке полёта, в то время как в выбранной для АМС «Фобос-Грунт» схеме выхода на орбиту вокруг Марса не предусматривалось использование аэродинамического торможения в атмосфере Марса, а лишь применение бортовой двигательной установки. Также при выведении Mars Science Laboratory на межпланетную траекторию применялось топливо с более высоким удельным импульсом (жидкий водород и жидкий кислород) по сравнению с использовавшимися на АМС «Фобос-Грунт» гептилом и тетраоксидом азота.
- 410 человек обеспечивает работу «Кьюриосити» с Земли — 250 учёных и примерно 160 инженеров[133]
- Поскольку марсианский день длиннее земного на 40 минут, команда миссии после посадки работала по марсианскому времени, поэтому очередной рабочий день начинался на 40 минут позже предыдущего.[134] После трех месяцев работы по марсианскому времени команда миссии, как было запланировано, вернулась к работе по земному времени.[135]
- Отставание от графика испытания марсохода составило всего один марсианский день, тогда как во времена первого марсохода НАСА — Sojourner — неудачным оказывался каждый третий день испытаний[136].
- «Кьюриосити» стал первым искусственным объектом на поверхности другой планеты, который воспроизвел человеческую речь, записанную на Земле, и успешно передал её обратно на Землю. В этом аудиоклипе директор НАСА Чарльз Боулдер поздравил команду MSL с успешной посадкой и началом движения марсохода.[137]
- Каждое колесо марсохода имеет три горизонтальных полоски с отверстиями, которые при движении марсохода оставляют на почве отпечаток в виде кода азбуки Морзе, состоящий из букв «J», «P» и «L» (·--- ·--· ·-··) — аббревиатуры Лаборатории реактивного движения, разработчика марсохода.
- Разработанная в НАСА технология позволила многократно уменьшить размер прибора рентгеновской дифракции — в «Кьюриосити» это куб со стороной 25 см (вместо привычного до этого устройства объёмом в два холодильника). Изобретение ввиду небольших размеров уже нашло применение на Земле в фармацевтике и геологических исследованиях.
- «Кьюриосити» на 1 января 2013 самый тяжелый космический аппарат, совершивший мягкую посадку на Марс.
- 5 августа 2013 года «Кьюриосити» спел себе песню «Happy Birthday to You»[138]. Эта мелодия Happy Birthday стала первой мелодией, прозвучавшей на Марсе[139][140].
MSL в культуре[править | править код]
- Работа марсохода и команды миссии привели к появлению в интернете множества тематических рисунков, чего ранее не случалось ни с одной подобной миссией[141].
- Число подписчиков микроблога @MarsCuriosity в социальной сети Twitter, ведущегося командой миссии «от лица» марсохода, к середине августа 2012 года превысило 1 млн человек[142].
- В сериале Футурама (7 сезон, 11 серия) марсоход был раздавлен.
- Curiosity есть в играх Angry Birds Space[143] и Kerbal Space Program.
Галерея[править | править код]
- Снимки с MRO
-
 Место падения парашюта, использовавшегося при посадке марсохода «Кьюриосити».
Место падения парашюта, использовавшегося при посадке марсохода «Кьюриосити». -
 Вид следов марсохода «Кьюриосити» из космоса. Начало его пути по кратеру Гейла.
Вид следов марсохода «Кьюриосити» из космоса. Начало его пути по кратеру Гейла.


- Снимки, сделанные «Кьюриосити»
-
 «Автопортрет» «Кьюриосити». Снимок мачты марсохода. (Камера MAHLI)
«Автопортрет» «Кьюриосити». Снимок мачты марсохода. (Камера MAHLI) -
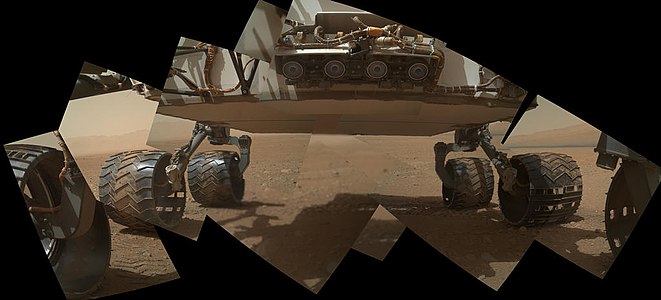 Панорама нижней части марсохода «Кьюриосити». Из снимков, сделанных камерой MAHLI.
Панорама нижней части марсохода «Кьюриосити». Из снимков, сделанных камерой MAHLI. -
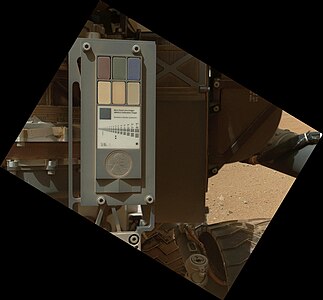 Калибровочная мишень для камеры MAHLI (марсоход Curiosity).
Калибровочная мишень для камеры MAHLI (марсоход Curiosity).



Видео[править | править код]
См. также[править | править код]
- Mars Pathfinder— марсоход НАСА первого поколения Соджорнер и автоматическая марсианская станция.
- Спирит — марсоход НАСА второго поколения. Первый из двух запущенных в рамках проекта Mars Exploration Rover.
- Оппортьюнити — марсоход НАСА второго поколения. Второй из двух запущенных в рамках проекта Mars Exploration Rover.
- Perseverance — марсоход НАСА запущенный в 2020 году.
Места посадок автоматических станций на Марсе[править | править код]

{kind=link}
Примечания[править | править код]
- ↑ 1 2 Martin, Paul K. NASA’S MANAGEMENT OF THE MARS SCIENCE LABORATORY PROJECT (IG-11-019). NASA OFFICE OF INSPECTOR GENERAL. Дата обращения: 6 августа 2012. Архивировано 17 августа 2012 года.
- ↑ 1 2 NASA — Mars Science Laboratory, the Next Mars Rover (англ.). NASA. Дата обращения: 6 августа 2012. Архивировано 29 мая 2013 года.
- ↑ 1 2 Guy Webster. Geometry Drives Selection Date for 2011 Mars Launch. NASA/JPL-Caltech. Дата обращения: 22 сентября 2011. Архивировано 17 августа 2012 года.
- ↑ 1 2 Allard Beutel. NASA's Mars Science Laboratory Launch Rescheduled for Nov. 26 (англ.). NASA (19 ноября 2011). Дата обращения: 21 ноября 2011. Архивировано 17 августа 2012 года.
- ↑ 1 2 Архивированная копия. Дата обращения: 8 августа 2012. Архивировано из оригинала 5 августа 2012 года.
- ↑ Дмитрий Гайдукевич, Алексей Кованов. Лучший автомобиль в истории человечества (англ.). Авто@mail.ru (14 августа 2012). Дата обращения: 14 августа 2012. Архивировано 16 августа 2012 года.
- ↑ Mars Science Laboratory Launch. NASA. — «about 2,700 watt hours per sol». Дата обращения: 29 мая 2013. Архивировано из оригинала 29 мая 2013 года.
- ↑ NASA’s 2009 Mars Science Laboratory (нем.). JPL. Дата обращения: 5 июня 2011. Архивная копия от 24 сентября 2011 на Wayback Machine
- ↑ Wheels and Legs (англ.). NASA. Дата обращения: 12 августа 2012. Архивировано 17 августа 2012 года.
- ↑ Data Rates/Returns, Mars Science Laboratory (англ.). NASA JPL. Дата обращения: 10 июня 2015. Архивировано 11 июня 2015 года.
- ↑ Mars Science Laboratory: Brains. Дата обращения: 16 августа 2012. Архивировано 24 февраля 2019 года.
- ↑ Марс испарят лазером // Популярная механика : журнал. — 2011. — № 4 (102). — С. 37. Архивировано 25 февраля 2014 года.
- ↑ "NASA Launches Most Capable and Robust Rover To Mars" (англ.). НАСА. 2011-11-26. Архивировано из оригинала 29 ноября 2011. Дата обращения: 28 ноября 2011.
- ↑ Where is Curiosity? — Mars Science Laboratory. Дата обращения: 22 мая 2017. Архивировано 28 марта 2017 года.
- ↑ Doug McCuistion (англ.). NASA. Дата обращения: 16 декабря 2011. Архивировано из оригинала 20 февраля 2012 года.
- ↑ Leone, Dan Mars Science Lab Needs $44M More To Fly, NASA Audit Finds (англ.). Space News International (8 июля 2011). Дата обращения: 31 июля 2012. Архивировано из оригинала 20 февраля 2012 года.
- ↑ Обнародованы детали миссии следующего марсохода NASA. Дата обращения: 6 сентября 2011. Архивировано из оригинала 15 марта 2015 года.
- ↑ Webster Guy, Brown Dwayne. NASA's Next Mars Rover To Land At Gale Crater (англ.). NASA JPL (22 июля 2011). Дата обращения: 22 июля 2011. Архивировано 20 февраля 2012 года.
- ↑ 1 2 Name NASA's Next Mars Rover (англ.). NASA/JPL (27 мая 2009). Дата обращения: 27 мая 2009. Архивировано из оригинала 20 февраля 2012 года.
- ↑ 1 2 NASA Selects Student's Entry as New Mars Rover Name (англ.). NASA/JPL (27 мая 2009). Дата обращения: 27 мая 2009. Архивировано 20 февраля 2012 года.
- ↑ The winning essay (англ.). NASA (27 мая 2009). Дата обращения: 7 ноября 2011. Архивировано 29 мая 2013 года.
- ↑ Curiosity’s Status Report (англ.). NASA. Дата обращения: 4 августа 2012. Архивировано 29 мая 2013 года.
- ↑ Watch Curiosity’s Landing (англ.). NASA. Дата обращения: 5 августа 2012. Архивировано 29 мая 2013 года.
- ↑ William Hardwood. NASA's Curiosity rover lands on Mars (англ.) (6 августа 2012). Дата обращения: 12 августа 2012. Архивировано 29 мая 2013 года.
- ↑ http://marsprogram.jpl.nasa.gov/msl/mission/science/ Архивная копия от 11 июля 2012 на Wayback Machine meet the four main science goals of the Mars Exploration Program:
- ↑ Overview. JPL. NASA. Дата обращения: 27 ноября 2011. Архивировано из оригинала 17 августа 2012 года.
- ↑ Mars Science Laboratory Mission Profile. Дата обращения: 21 августа 2012. Архивировано из оригинала 21 февраля 2011 года.
- ↑ Марсоход MSL завершил сбор данных по космической радиации. Lenta.ru (3 августа 2012). Дата обращения: 14 августа 2012. Архивировано 6 августа 2012 года.
- ↑ NASA — Curiosity, The Stunt Double (2012). Дата обращения: 4 августа 2012. Архивировано 1 августа 2012 года.
- ↑ Spacecraft Summary (англ.). JPL (10 апреля 2011). Дата обращения: 10 апреля 2011. Архивировано 4 июня 2013 года.
- ↑ EMCORE PhotoVoltaics Awarded Mars Cruise Stage Solar Panel Manufacturing Contract from NASA's Jet Propulsion Laboratory (JPL) (англ.). EMCORE Corporation (28 апреля 2007). Дата обращения: 10 апреля 2011. Архивировано из оригинала 4 июня 2013 года.
- ↑ 1 2 3 Mars Science Laboratory: Cruise Configuration (англ.). JPL (10 апреля 2011). Дата обращения: 10 апреля 2011. Архивировано 4 июня 2013 года.
- ↑ 2011 Thermoelectrics Applications Workshop (англ.). JPL (10 апреля 2011). Дата обращения: 10 апреля 2011. Архивировано 4 июня 2013 года.
- ↑ 1 2 3 4 5 6 7 8 9 10 11 12 13 Andre Makovsky, Peter Ilott, Jim Taylor. Mars Science Laboratory Telecommunications System Design (англ.) (PDF). Deep Space Communications and Navigation Systems. JPL (ноябрь 2009). Дата обращения: 9 апреля 2011. Архивировано из оригинала 28 февраля 2013 года.
- ↑ Mars Science Laboratory Aeroshell (MSL) (англ.). Lockheed Martin. Архивировано 1 октября 2023 года. Архивная копия от 28 декабря 2011 на Wayback Machine
- ↑ Более точно, в источнике указано: "до 3500 градусов по Фаренгейту", что соответствует 1926° по шкале Цельсия.
- ↑ 1 2 3 4 MSL Science Corner: MSL EDL Instrument (MEDLI) Suite (англ.). NASA/JPL (11 июня 2011). Дата обращения: 1 октября 2023. Архивировано из оригинала 16 июня 2011 года.
- ↑ Descanso14_MSL_Telecom.pdf page 86
- ↑ 1 2 Miguel San Martin. The MSL SkyCrane Landing Architecture: a GN&C Perspective (англ.) // International Planetary Probe Conference : презентация. — Barcelona, 14—18 июня 2010. — P. 20. Архивировано 9 декабря 2014 года.
- ↑ M. C.; Malin; Bell, J. F.; Cameron, J.; Dietrich, W. E.; Edgett, K. S.; Hallet, B.; Herkenhoff, K. E.; Lemmon, M. T.; Parker, T. J. The Mast Cameras and Mars Descent Imager (MARDI) for the 2009 Mars Science Laboratory (англ.) // 36th Annual Lunar and Planetary Science Conference : journal. — 2005. — Vol. 36. — P. 1214. — . Архивировано 10 мая 2021 года.
- ↑ 1 2 3 4 Mast Camera (Mastcam). NASA/JPL. Дата обращения: 18 марта 2009. Архивировано 17 августа 2012 года.
- ↑ Mars Hand Lens Imager (MAHLI). NASA/JPL. Дата обращения: 23 марта 2009. Архивировано 17 августа 2012 года.
- ↑ Mars Descent Imager (MARDI). NASA/JPL. Дата обращения: 3 апреля 2009. Архивировано 17 августа 2012 года.
- ↑ 1 2 3 Mars Science Laboratory (MSL): Mast Camera (Mastcam): Instrument Description. Malin Space Science Systems. Дата обращения: 19 апреля 2009. Архивировано 17 августа 2012 года.
- ↑ Mars Science Laboratory Instrumentation Announcement from Alan Stern and Jim Green, NASA Headquarters. SpaceRef Interactive. Дата обращения: 9 ноября 2007. Архивировано из оригинала 17 августа 2012 года.
- ↑ Martian Surface Below Curiosity. Дата обращения: 7 августа 2012. Архивировано 17 августа 2012 года.
- ↑ Марсоход Curiosity совершил посадку на Красную планету. НИИАР (6 августа 2012). Дата обращения: 14 февраля 2019. Архивировано 25 января 2021 года.
- ↑ США для полетов на Марс потребовались российские изотопы кюрия-244. Lenta.ru (28 ноября 2014). Дата обращения: 15 февраля 2019. Архивировано 21 октября 2020 года.
- ↑ Источники кюрия-244 производства ГНЦ НИИАР будут использованы Индией для полетов на Луну. НИИАР (14 февраля 2017). Дата обращения: 14 февраля 2019. Архивировано 25 января 2021 года.
- ↑ Росатом поможет Индии изучать Луну с помощью радиации. РИА Новости (13 февраля 2017). Дата обращения: 14 февраля 2019. Архивировано 27 января 2021 года.
- ↑ MSL Science Corner: Chemistry & Mineralogy (CheMin). NASA/JPL. Дата обращения: 13 мая 2011. Архивировано 5 ноября 2012 года.
- ↑ Российский нейтронный детектор ДАН для проекта мобильного посадочного аппарата НАСА «Марсианская научная лаборатория». Федеральное космическое агентство. Архивировано из оригинала 21 января 2012 года.
- ↑ Российский нейтронный детектор ДАН для мобильного посадочного аппарата НАСА «Марсианская научная лаборатория». Отдел №63 «Ядерной планетологии». ИКИ РАН. Дата обращения: 15 февраля 2019. Архивировано 15 февраля 2019 года.
- ↑ 1 2 Ильин А. Марсианский слоеный пирог. Новости космонавтики (февраль 2013). Архивировано 1 февраля 2014 года.
- ↑ НАСА наградило российских ученых за прибор ДАН на марсоходе Curiosity. РИА Новости (25 декабря 2015). Дата обращения: 15 февраля 2019. Архивировано 15 февраля 2019 года.
- ↑ Владимир Мироненко. Российские учёные получили награду NASA за разработку прибора для марсохода Curiosity. 3DNews (28 декабря 2015). Дата обращения: 15 февраля 2019. Архивировано 15 февраля 2019 года.
- ↑ 1 2 The Mars Landing Approach: Getting Large Payloads to the Surface of the Red Planet. Universe Today. Дата обращения: 21 октября 2008. Архивировано 17 августа 2012 года.
- ↑ "Nasa's Curiosity rover targets smaller landing zone". BBC News. 2012-06-12. Архивировано из оригинала 12 июня 2012. Дата обращения: 12 июня 2012.
{{cite news}}:|first=пропущен|last=(справка) - ↑ 1 2 3 4 Final Minutes of Curiosity's Arrival at Mars. NASA/JPL. Дата обращения: 8 апреля 2011. Архивировано 17 августа 2012 года.
- ↑ "Why NASA's Mars Curiosity Rover landing will be "Seven Minutes of Absolute Terror"". NASA. Centre National d'Etudes Spatiales (CNES). 2012-06-28. Архивировано из оригинала 3 августа 2012. Дата обращения: 13 июля 2012.
- ↑ Mission Timeline: Entry, Descent, and Landing. NASA and JPL. Дата обращения: 7 октября 2008. Архивировано из оригинала 19 июня 2008 года.
- ↑ 1 2 3 4 5 "Curiosity relies on untried 'sky crane' for Mars descent". Spaceflight Now. 2012-07-31. Архивировано из оригинала 9 февраля 2022. Дата обращения: 1 августа 2012.
- ↑ NASA, Large Heat Shield for Mars Science Laboratory Архивная копия от 9 февраля 2022 на Wayback Machine, July 10, 2009 (Retrieved March 26, 2010)
- ↑ 1 2 Mars Science Laboratory Parachute Qualification Testing. NASA/JPL. Дата обращения: 15 апреля 2009. Архивировано 17 августа 2012 года.
- ↑ Научный раздел MSL: Марсианская фотокамера снижения (MARDI). Архивная копия от 19 августа 2012 на Wayback Machine (англ.)
- ↑ Mars Science Laboratory: Entry, Descent, and Landing System Performance 7. NASA (март 2006). Дата обращения: 5 августа 2012. Архивировано 27 июня 2011 года.
- ↑ Aerojet Ships Propulsion for Mars Science Laboratory. Aerojet. Дата обращения: 18 декабря 2010. Архивировано 17 августа 2012 года.
- ↑ Sky Crane — how to land Curiosity on the surface of Mars Архивная копия от 3 августа 2012 на Wayback Machine by Amal Shira Teitel.
- ↑ "Mars rover lands on Xbox Live". USA Today. 2012-07-17. Архивировано из оригинала 1 августа 2012. Дата обращения: 27 июля 2012.
{{cite news}}:|first=пропущен|last=(справка) - ↑ Scene of a Martian Landing (англ.) (7 августа 2012). Дата обращения: 11 октября 2012. Архивировано из оригинала 7 июня 2013 года.
- ↑ http://www.jpl.nasa.gov/news/news.php?release=2012-220 Архивная копия от 4 ноября 2012 на Wayback Machine « its 352-million-mile (567-million-kilometer) flight to Mars.»
- ↑ Staking out Curiosity’s Landing Site PIA16030b Архивная копия от 13 августа 2012 на Wayback Machine // NASA: "the quadrangle where NASA’s Curiosity rover landed, now called Yellowknife. The mission’s science team has divided the landing region into several square quadrangles, or quads, of interest about 1-mile (1.3-kilometers) wide. "
- ↑ Staking out Curiosity’s Landing Site, PIA16031b Архивная копия от 13 августа 2012 на Wayback Machine // NASA: «Curiosity landed in the quad called Yellowknife (number 51)»
- ↑ NASA Mars Rover Begins Driving At Bradbury Landing. NASA (22 августа 2012). Дата обращения: 24 августа 2012. Архивировано из оригинала 3 октября 2012 года.
- ↑ развернул мачту и передал фотографию c навигационной камеры. Дата обращения: 26 июня 2020. Архивировано 14 февраля 2015 года.
- ↑ Curiosity rover: Martian solar day 2. Дата обращения: 23 августа 2012. Архивировано 25 августа 2012 года.
- ↑ Марсианский пейзаж оказался похож на земной. Дата обращения: 23 августа 2012. Архивировано 12 августа 2012 года.
- ↑ NASA Curiosity Mars Rover Installing Smarts For Driving. NASA (10 августа 2012). Дата обращения: 11 августа 2012. Архивировано из оригинала 17 августа 2012 года.
- ↑ Curiosity Sends High-Resolution Color Images from Gale Crater. NASA (11 августа 2012). Дата обращения: 12 августа 2012. Архивировано из оригинала 17 августа 2012 года.
- ↑ Orbiter Views NASA's New Mars Rover In Color. NASA (14 августа 2012). Дата обращения: 15 августа 2012. Архивировано из оригинала 17 августа 2012 года.
- ↑ Российский прибор ДАН успешно начал работу на борту марсохода Curiosity (17 августа 2012). Дата обращения: 17 августа 2012. Архивировано 19 августа 2012 года.
- ↑ NASA Curiosity Team Pinpoints Site For First Drive. NASA (17 августа 2012). Дата обращения: 14 мая 2013. Архивировано из оригинала 18 августа 2012 года.
- ↑ Rover's Laser Instrument Zaps First Martian Rock. NASA (19 августа 2012). Дата обращения: 20 августа 2012. Архивировано из оригинала 21 августа 2012 года.
- ↑ Марсоход Curiosity обстрелял лазером Красную планету. Дата обращения: 14 мая 2013. Архивировано из оригинала 22 августа 2012 года.
- ↑ Curiosity Stretches its Arm. NASA (20 августа 2012). Дата обращения: 21 августа 2012. Архивировано из оригинала 3 октября 2012 года.
- ↑ Curiosity drives on the Surface of Mars for the first Time (22 августа 2012). Дата обращения: 28 августа 2012. Архивировано из оригинала 3 октября 2012 года.
- ↑ Rover Completes Fourth Drive. NASA (30 августа 2012). Дата обращения: 31 августа 2012. Архивировано из оригинала 3 октября 2012 года.
- ↑ NASA Mars Rover Curiosity Begins Arm-Work Phase. NASA (6 сентября 2012). Дата обращения: 7 сентября 2012. Архивировано из оригинала 4 октября 2012 года.
- ↑ Sample-Handling Gear Gets a Buzz (13 сентября 2012). Дата обращения: 13 сентября 2012. Архивировано из оригинала 4 октября 2012 года.
- ↑ More Meters in Curiosity's Rearview Mirror. NASA (17 сентября 2012). Дата обращения: 18 сентября 2012. Архивировано из оригинала 4 октября 2012 года.
- ↑ Driving and Moon-Watching. NASA (18 сентября 2012). Дата обращения: 18 сентября 2012. Архивировано из оригинала 4 октября 2012 года.
- ↑ Curiosity Traverse Map Through Sol 43. NASA (19 сентября 2012). Дата обращения: 19 сентября 2012. Архивировано 4 октября 2012 года.
- ↑ Марсоход сфотографировал "фобосовское затмение" на Марсе (19 сентября 2012). Дата обращения: 20 сентября 2012. Архивировано 4 октября 2012 года.
- ↑ Curiosity Finishes Close Inspection of Rock Target. NASA (24 сентября 2012). Дата обращения: 25 сентября 2012. Архивировано из оригинала 4 октября 2012 года.
- ↑ Continuing Toward Glenelg. NASA (25 сентября 2012). Дата обращения: 26 сентября 2012. Архивировано из оригинала 4 октября 2012 года.
- ↑ Longest Drive Yet. NASA (26 сентября 2012). Дата обращения: 27 сентября 2012. Архивировано из оригинала 4 октября 2012 года.
- ↑ Curiosity's Travels Through Sol 56. NASA (10 апреля 2012). Дата обращения: 4 октября 2012. Архивировано 4 октября 2012 года.
- ↑ Марсоход «Кьюриосити» пробурил первую скважину. Дата обращения: 11 февраля 2013. Архивировано из оригинала 12 февраля 2013 года.
- ↑ A Habitable Fluvio-Lacustrine Environment at Yellowknife Bay, Gale Crater, Mars. Архивная копия от 15 декабря 2013 на Wayback Machine (англ.)
- ↑ After a Two-Year Trek, NASA’s Mars Rover Reaches Its Mountain Lab Архивная копия от 13 апреля 2019 на Wayback Machine (англ.)
- ↑ Sol 759—760 Update on Curiosity from USGS Scientist Ryan Anderson: Drill Baby, Drill! Архивная копия от 1 декабря 2014 на Wayback Machine // Curiosity Mission updates (англ.)
- ↑ Роман Фишман. Геолог на Марсе // Популярная механика. — 2017. — № 8. — С. 30—35.
- ↑ «Curiosity’s onboard labs back in action after a year offline» Архивная копия от 20 июля 2018 на Wayback Machine New Atlas, June 5, 2018
- ↑ Taking Mars' Temperature. NASA (21 августа 2012). Дата обращения: 22 августа 2012. Архивировано 3 октября 2012 года.
- ↑ Марсианская весна оказалось неожиданно теплой, заявили планетологи (28 сентября 2012). Дата обращения: 28 сентября 2012. Архивировано 7 октября 2012 года.
- ↑ Детектор ДАН «нащупал» в месте посадки Curiosity около 1,5 % воды (24 августа 2012). Дата обращения: 9 сентября 2012. Архивировано 4 октября 2012 года.
- ↑ Марсоход Curiosity находит лишь капли в бывшем море (8 сентября 2012). Дата обращения: 9 сентября 2012. Архивировано 4 октября 2012 года.
- ↑ Марсоход сфотографировал «фобосовское затмение» на Марсе (19 сентября 2012). Дата обращения: 20 сентября 2012. Архивировано 4 октября 2012 года.
- ↑ Марсоход Curiosity нашел следы древнего марсианского ручья (27 сентября 2012). Дата обращения: 28 сентября 2012. Архивировано 7 октября 2012 года.
- ↑ Curiosity нашел ранее неизвестный тип минерала на Марсе (11 декабря 2012). Дата обращения: 12 октября 2012. Архивировано 18 октября 2012 года.
- ↑ Почвы Марса схожи по составу с вулканическим туфом на Гавайях - НАСА (31 октября 2012). Дата обращения: 31 октября 2012. Архивировано 20 ноября 2012 года.
- ↑ Американский марсоход "Кьюриосити" обнаружил на Красной планете простые органические молекулы (28 ноября 2012). Дата обращения: 28 ноября 2012. Архивировано из оригинала 30 ноября 2012 года.
- ↑ В NASA опровергли слухи об обнаружении органики на Марсе (30 ноября 2012). Дата обращения: 30 ноября 2012. Архивировано 2 декабря 2012 года.
- ↑ «Кьюриосити» пробурил поверхность Марса Архивная копия от 28 ноября 2020 на Wayback Machine// Лента.ру
- ↑ NASA: анализ почвы Марса, проведенный Curiosity, подтвердил наличие в прошлом на Красной планете условий для жизни Архивная копия от 16 марта 2013 на Wayback Machine // ИТАР-ТАСС 12/03/2013
- ↑ NASA Rover Finds Conditions Once Suited for Ancient Life on Mars Архивная копия от 3 июля 2013 на Wayback Machine // NASA, 12.03.2013
- ↑ "Марсоход Curiosity обнаружил на Красной планете следы метана". UfaTime.ru. 2014-12-17. Архивировано из оригинала 17 декабря 2014. Дата обращения: 17 декабря 2014.
- ↑ NASA. NASA Rover Finds Active, Ancient Organic Chemistry on Mars (16 декабря 2014). Дата обращения: 17 декабря 2014. Архивировано 17 декабря 2014 года.
- ↑ Дмитрий Трунин. Curiosity нашел бор в марсианской почве. nplus1.ru. Дата обращения: 7 сентября 2017. Архивировано 8 сентября 2017 года.
- ↑ Patrick J. Gasda, Ethan B. Haldeman, Roger C. Wiens, William Rapin, Thomas F. Bristow. In situ detection of boron by ChemCam on Mars (англ.) // Geophysical Research Letters. — P. 2017GL074480. — ISSN 1944-8007. — doi:10.1002/2017GL074480. Архивировано 8 сентября 2017 года.
- ↑ НАСА: путешественники к Марсу получат предельно высокую дозу радиации (30 мая 2013). Дата обращения: 31 мая 2013. Архивировано 3 июня 2013 года.
- ↑ SwRI-led team calculates the radiation exposure associated with a trip to Mars (30 мая 2013). Дата обращения: 12 декабря 2013. Архивировано 13 декабря 2013 года.
- ↑ Ученые опубликовали первые оценки уровня радиации на поверхности Марса (9 декабря 2013). Дата обращения: 11 декабря 2013. Архивировано 13 февраля 2014 года.
- ↑ DEGRADATION OF THE ORGANIC MOLECULES IN THE SHALLOW SUBSURFACE OF MARS DUE TO IRRADIATION BY COSMIC RAYS. A. A. Pavlov, G. Vasilyev, V. M. Ostryakov, A. K. Pavlov and P. Mahaffy, NASA Goddard Space Flight Center, Laboratory of Mass Spectrometry, Ioffe Physico-Technical Institute of Russian Academy of Sciences, St. Petersburg, Russia. Дата обращения: 12 декабря 2013. Архивировано 22 июля 2014 года.
- ↑ Scarp Retreat Model and Exposure History of 'Yellowknife Bay' (12 сентября 2013). Дата обращения: 12 декабря 2013. Архивировано 2 апреля 2015 года.
- ↑ Марсоход Curiosity в ходе посадки лишился одного из двух "флюгеров". РИА Новости (21 августа 2012). Дата обращения: 22 августа 2012. Архивировано 3 октября 2012 года.
- ↑ Работа марсохода Curiosity приостановлена из-за обнаруженной детали (9 октября 2012). Дата обращения: 9 октября 2012. Архивировано 18 октября 2012 года.
- ↑ Curiosity нашел ранее неизвестный тип минерала на Марсе (11 октября 2012). Дата обращения: 12 октября 2012. Архивировано 18 октября 2012 года.
- ↑ Mars Science Laboratory: Computer Swap on Curiosity Rover. Дата обращения: 5 марта 2013. Архивировано из оригинала 10 марта 2013 года.
- ↑ Работа Curiosity остановлена из-за «мягкого» короткого замыкания (21 ноября 2013). Дата обращения: 11 декабря 2013. Архивировано 11 декабря 2013 года.
- ↑ Марсоход Curiosity вернулся к работе после сбоя в энергосистеме (26 ноября 2013). Дата обращения: 11 декабря 2013. Архивировано 11 декабря 2013 года.
- ↑ С песней по Марсу (7 августа 2015). Дата обращения: 16 августа 2015. Архивировано из оригинала 1 октября 2015 года.
- ↑ Десять любопытных фактов о марсоходе Curiosity (21 августа 2012). Дата обращения: 3 ноября 2012. Архивировано из оригинала 5 ноября 2012 года.
- ↑ NASA To Host Curiosity Rover Teleconference Aug. 17. NASA/JPL (16 августа 2012). Дата обращения: 17 августа 2012. Архивировано из оригинала 18 августа 2012 года.
- ↑ Curiosity Team Switches Back to Earth Time (6 ноября 2012). Дата обращения: 6 апреля 2013. Архивировано из оригинала 17 апреля 2013 года.
- ↑ Марсоход Curiosity закончит испытания научных инструментов (13 сентября 2012). Дата обращения: 13 сентября 2012. Архивировано 4 октября 2012 года.
- ↑ Марсоход Curiosity стал первым "говорящим" зондом на Марсе. РИА Новости (28 августа 2012). Дата обращения: 28 августа 2012. Архивировано 7 октября 2012 года.
- ↑ NASA | Happy Birthday, Curiosity! Дата обращения: 31 марта 2015. Архивировано 30 марта 2015 года.
- ↑ Кузнецов Сергей. «Happy Birthday» стала первой мелодией, исполненной на Марсе. FTimes.ru. FTimes.ru (5 июля 2015). Дата обращения: 5 июля 2015. Архивировано из оригинала 13 июля 2015 года.
- ↑ Happy Birthday, Curiosity! NASA (4 августа 2013). Дата обращения: 7 августа 2013. Архивировано 10 августа 2013 года.
- ↑ Вселенная и ирокезы. РИА Новости (30 августа 2012). Дата обращения: 31 августа 2012. Архивировано 3 октября 2012 года.
- ↑ На твиттер марсохода «Кьюриосити» подписался миллион человек. Lenta.ru (15 августа 2012). Дата обращения: 19 августа 2012. Архивировано 16 июля 2013 года.
- ↑ Игры@mail.ru Героев Angry Birds Space отправят на Марс Архивная копия от 25 ноября 2020 на Wayback Machine; Angry Birds teams up with NASA for Angry Birds Space. Lovable Mars rover Curiosity serves as inspiration Архивная копия от 5 декабря 2014 на Wayback Machine
Ссылки[править | править код]
- Mars Science Laboratory (JPL) — сайт проекта
- Mars Science Laboratory — статья в Лентапедии. 2012 год.
- Curiosity construction webcam
- Миссии 2011-го года: Mars Science Laboratory
- РОБОТ В ПОИСКАХ ЖИЗНИ: НА СТАРТ CURIOSITY (статья на сайте журнала Популярная механика)
- Ролик JPL о полёте Сuriosity к Марсу (TRT-5:20)
- Полная хронология событий с момента посадки
- Mars Science Laboratory: 7 минут страха
- Mars Science Laboratory: Место посадки — кратер Гейла
- 20 фотографий Марса высокой четкости (марсоход Curiosity)
- 10 инструментов Curiosity: Mastcam
- Посадка с камеры MARDI
- Марсоход Curiosity делает снимки облаков Марса Архивная копия от 6 января 2015 на Wayback Machine
| В библиографических каталогах |
|---|
Исследование Марса космическими аппаратами | |
|---|---|
| Пролётные | |
| Орбитальные | |
| Посадочные | |
| Марсоходы | |
| Марсолёты | |
| Запланированные |
|
| Предложенные | |
| Потерянные | |
| Отменённые | |
| См. также | |
Полужирным выделены действующие космические аппараты | |
Летательные аппараты и ракетно-космическая техника корпораций Lockheed и Lockheed Martin | |
|---|---|
| Истребители | |
| Ударные | |
| Военно-транспортные | |
| Разведывательные | |
| Пассажирские | |
| Тяжеловооружённые | |
| Общего назначения | |
| Учебно-тренировочные | |
| Патрульные | |
| Беспилотные | |
| Вертолёты | |
| Космические аппараты | |
| Спутники | |
| Военные спутники | |
| Ракеты-носители | |