Спирит (марсоход)
| Спирит | |
|---|---|
| Mars Exploration Rover A | |
 Плановая проверка систем ровера перед отправкой на Марс | |
| Заказчик |
|
| Производитель | Boeing, Lockheed Martin |
| Оператор | Лаборатория реактивного движения |
| Задачи | Изучение Марса |
| Стартовая площадка |
|
| Ракета-носитель | Дельта-2 7925-9.5 D298 |
| Запуск | 10 июня 2003 17:58:47 UTC |
| COSPAR ID | 2003-027A |
| SCN | 27827 |
| Технические характеристики | |
| Масса | 185 кг[1] |
| Размеры | 1,6 × 2,3 × 1,5 м |
| Мощность |
140 ватт электроэнергии, примерно 0,3-0,9 кВт·ч/сол (свыше 4,0 ампер), Два литий-ионных аккумулятора ёмкостью 8 А·ч каждый[2] |
| Источники питания | Панели солнечных батарей на основе арсенида галлия |
| Движитель |
максимальная — 5 см/сек, 1 см/сек (34 м/ч) на Марсе, с учётом проскальзывания колёс[3] |
| Срок активного существования |
Планируемая: 90 сол (92,5 суток) Эксплуатация: 2210 сол - последний контакт с ровером Подвижность: 1892 сол с момента застревания в песчаной дюне Всего: до 2623 сол - попытки установить контакт с марсоходом |
| Элементы орбиты | |
| Посадка на небесное тело |
4 января 2004 года 4:35 UTC |
| Координаты посадки | 14°34′18″ ю. ш. 175°28′43″ в. д. / 14,5718° ю. ш. 175,4785° в. д.G в кратер Гусева |
| Целевая аппаратура | |
| Панорамные камеры (Pancam) | Пара камер с набором светофильтров. Помогают изучить структуру, цвет и минералогию местного ландшафта. |
| Навигационные камеры (Navcam) | Пара монохромных камер с широким полем зрения. Используются в навигации. |
| Миниатюрный тепловой эмиссионный спектрометр (Mini-TES) | Просматривает горную породу и марсианский грунт в инфракрасном диапазоне для более подробного анализа другими инструментами, также определяет процессы, которые их сформировали. |
| Камеры избегания опасности (Hazcam) | Две пары чёрно-белых камер спереди и сзади марсохода. Камеры с 120 градусным полем зрения обеспечивают дополнительные данные о состоянии ровера, используются в навигации. |
| Мёссбауэровский спектрометр (MIMOS II) | Проводит исследования минералогии железосодержащих пород и марсианских грунтов. |
| Рентгеновский спектрометр альфа-частиц (APXS) | Проводит химический анализ горных пород и марсианских грунтов. |
| Микрокамера (MI ) | Делает макроснимки марсианской поверхности. |
| Инструмент истирания камней (RAT) | Мощный шлифовальный станок, способный создавать углубление диаметром 45 мм и глубиной 5 мм на скальной поверхности. Инструмент расположен на манипуляторе ровера и весит 720 грамм. |
| Скорость передачи | 6-25 МБ/сутки |
| Бортовая память | ОЗУ 128 МБ[4] |
| Разрешение изображения | 0,273 ± 0,003 мрад/пиксель, что соответствует 1 мм/пиксель с расстояния 3 м от марсохода. |
| marsrovers.jpl.nasa.gov/… | |
«Спи́рит»[5], «Spirit» (с англ. — «дух»), или «MER-A» (сокр. от Mars Exploration Rover — A) — первый марсоход космического агентства НАСА из двух запущенных США в рамках проекта Mars Exploration Rover. Старт миссии состоялся 10 июня 2003 года[6]. Спускаемый аппарат с марсоходом совершил мягкую посадку на Марс 4 января 2004 года за три недели до прибытия его близнеца «Оппортьюнити» (MER-B), который был успешно доставлен в другой район Марса, смещённый по долготе примерно на 180 градусов. В мае 2009 года марсоход застрял в песчаной дюне. Последняя связь с Землёй была 22 марта 2010 года.
Марсоход работал гораздо дольше, чем запланированные 90 солов (марсианских солнечных суток). Благодаря очистке солнечных батарей естественным ветром Марса выработка электроэнергии значительно повысилась, из-за чего «Спирит» продолжал эффективно функционировать долгое время, в конечном итоге значительно превысив запланированный срок службы. «Спирит» проехал 7,73 км вместо запланированных 600 м, что позволило сделать более обширные анализы геологических пород Марса.
1 мая 2009 года (через 5 лет, 3 месяца, 27 земных суток после посадки, что в 21,6 раза больше, чем запланированные 90 солов), «Спирит» застрял в песчаной дюне. Это была не первая такая ситуация с роверами, и в течение последующих восьми месяцев НАСА тщательно её анализировало; выполнялось моделирование участка, программирование, продолжались усилия по освобождению. Эти усилия продолжались до 26 января 2010 года, когда НАСА объявило, что высвобождению марсохода препятствует его расположение в мягком грунте, хотя научные исследования данного места продолжались.
Ровер продолжали использовать как стационарную платформу, общение со «Спиритом» прекратилось на 2210-й сол (22 марта 2010 года). JPL продолжала попытки восстановить контакт с ровером до 24 мая 2011 года, когда НАСА объявило, что усилия не принесли результатов, ровер молчал. Прощание со «Спиритом» состоялось в штаб-квартире НАСА и транслировалось на NASA TV.
Название марсоходу было дано в рамках традиционного конкурса НАСА 9-летней девочкой русского происхождения Софи Коллиз, родившейся в Сибири и удочерённой американской семьёй из Аризоны[7].
Цели миссии[править | править код]
Ракета-носитель[править | править код]
«Спирит» был запущен ракетой-носителем «Дельта II 7925». Это чуть менее мощная ракета-носитель, чем «Дельта-2 7925-H», с помощью которой был запущен его близнец — марсоход «Оппортьюнити».
Семейство ракет-носителей «Дельта-2» на тот момент находилось в эксплуатации уже более 10 лет. С их помощью успешно запущены 90 проектов, в том числе и последние шесть миссий НАСА на Марс: «Mars Global Surveyor» и «Mars Pathfinder» в 1996 году, «Mars Climate Orbiter» в 1998 году, «Mars Polar Lander» в 1999 году, «Марс Одиссей» в 2001 году и «Феникс» в 2007 году.
Конструкция[править | править код]
Сравнение Спирита c другими марсоходами[править | править код]
| Кьюриосити | MER | Соджорнер | |
|---|---|---|---|
| Запуск | 2011 | 2003 | 1996 |
| Масса (кг) | 899 | 174[8] | 10,6[9] |
| Размеры (в метрах, Д×Ш×В) | 3,1 × 2,7 × 2,1 | 1,6 × 2,3 × 1,5[8] | 0,7 × 0,5 × 0,3[9] |
| Энергия (кВт·ч/сол) | 2.5-2,7 | 0,3—0,9[10] | < 0,1[11] |
| Научные инструменты | 10[12] | 5 | 4[9] |
| Максимальная скорость (см/сек) | 4 | 5[13] | 1[14] |
| Передача данных (МБ/сутки) | 19—31 | 6—25[15] | < 3,5[16] |
| Производительность компьютера (MIPS) | 400 | 20[17] | 0,1[18] |
| Оперативная память (МB) | 256[19] | 128 | 0,5 |
| Расчётный район посадки (км) | 20×7 | 80×12 | 200×100 |
-
 Сложенный «Спирит» на финальной сборке перед запуском
Сложенный «Спирит» на финальной сборке перед запуском -
 Старт ракеты «Дельта-2» с марсоходом «Спирит» на борту
Старт ракеты «Дельта-2» с марсоходом «Спирит» на борту -
 Модели всех трёх марсоходов в сравнении: Соджорнер (самый маленький), Спирит/Оппортьюнити (средний), Кьюриосити (самый большой)
Модели всех трёх марсоходов в сравнении: Соджорнер (самый маленький), Спирит/Оппортьюнити (средний), Кьюриосити (самый большой)



Обзор миссии[править | править код]


Основная задача «Спирита» заключалась в том, чтобы марсоход продержался 90 сол (92,5 земных суток), за это время проводя многочисленные исследования Марса. Миссия получила несколько расширений и продолжалась в течение ~2208 сол. 11 августа 2007 года «Спирит» стал вторым аппаратом по сроку функционирования на поверхности Марса — 1282 сол, предыдущий рекорд принадлежал спускаемому аппарату «Викинг-2». «Викинг-2» использовал ядерную энергию, в то время как «Спирит» питался только от солнечных батарей. 19 мая 2010 года «Оппортьюнити» стал самым долго функционирующим аппаратом в истории Марса, предыдущий рекорд в 2245 сол принадлежал спускаемому аппарату «Викинг-1». 22 марта 2010 года «Спирит» передал своё последнее сообщение; таким образом, ему не хватило 1 месяца, чтобы превзойти аппарат «Викинг-1» по сроку службы.
Общее количество пройденного пути по состоянию на 22 марта 2010 года (2210 сол) составило 7,7305 километра.
События[править | править код]
2004[править | править код]
Спускаемый аппарат со «Спиритом» успешно приземлился на поверхность Марса в 4:35 UTC 4 января 2004 года. Это было началом его миссии планируемой продолжительностью в 90 сол. Очистка солнечных батарей позволила продлить его миссию, и она продолжалась до 2010 года.
Мемориальная Станция шаттла Колумбия[править | править код]
«Спирит» был направлен в кратер Гусева, который раньше, возможно, был озером. Ровер приземлился примерно в 10 км от центра эллипса планируемой посадки в точке с координатами 14°34′18″ ю. ш. 175°28′43″ в. д. / 14,5718° ю. ш. 175,4785° в. д.G
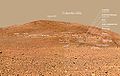
После того, как сработали подушки безопасности и посадочная платформа остановилась, ровер выехал и начал передавать панорамные изображения. Они дают ученым необходимую информацию для выбора геологических объектов, перспективных для научных исследований.
Данное панорамное изображение показывает холмы на горизонте до 27 км. Команда MER назвала посадочную платформу «Мемориальная станция шаттла Колумбия» в честь семи астронавтов, погибших в космической катастрофе шаттла Колумбия.

Сонная лощина[править | править код]

«Сонная лощина» — мелкое углубление, кратер (в правой части фото) диаметром 9 метров, заинтересовавший учёных из НАСА. Ровер покинул посадочную платформу и был направлен для исследования этого кратера, находящегося на расстоянии 12 метров.
Первое цветное фото[править | править код]
Справа первое цветное изображение, составленное из нескольких снимков, полученных панорамной камерой «Спирита». У снимка было самое высокое разрешение, когда-либо принятое с поверхности другой планеты. «Мы видим мозаику из четырёх снимков Pancam: одно в высоту и три в ширину», сказал конструктор камеры Джим Белл из Корнеллского университета. Показанный снимок имел разрешение 4000 на 3000 пикселей. Тем не менее, Pancam камера может делать снимки 8 раз больше этого, также они могут быть сняты в стереоформате (например, в два слоя, что делает разрешение в два раза больше). Цвета являются достаточно точными.
Камера Pancam делает чёрно-белые снимки. Тринадцать вращающихся фильтров производят одно изображение в разных цветовых спектрах. После получения на Земле, эти снимки могут быть скомбинированы для получения цветного изображения.
Проблемы с флэш-памятью[править | править код]
21 января 2004 года (18-й сол с момента посадки) «Спирит» неожиданно перестал общаться с центром управления. На следующий день ровер на скорости 7,8 бит/с передал сигнал, подтверждающий, что марсоход принял сообщение с Земли, но находится в режиме сбоя, ответы на команды будут передаваться только периодически. Было заявлено, что возникла серьёзная неисправность, однако потенциально восстановимая в случае, если причиной проблемы является программная ошибка, а не аппаратный сбой. «Спириту» была дана команда передать данные о его техническом состоянии. 23 января ровер сначала отправил несколько коротких сообщений на очень низкой скорости, после чего, наконец, произвел передачу 73 мегабит (~9,1 мегабайт) в X-диапазоне через ретранслятор «Марс Одиссей». Эти данные показали, что марсоход не перешёл в спящий режим, а значит, он продолжает расходовать энергию в аккумуляторах и перегреваться, что потенциально может окончательно вывести его из строя, если проблема не будет исправлена в ближайшее время. На 20-й сол инженеры отправили команду SHUTDWN_DMT_TIL («Shutdown Dammit Until …», «отключиться к черту до …»), чтобы ровер отключился до заданного времени и перестал расходовать энергию, однако он проигнорировал эту команду.
Основной версией о сложившейся неполадке стало то, что марсоход застрял в т. н. «перезагрузочной петле». Марсоход был запрограммирован на перезагрузку, если в системе обнаружится неисправность. Однако, если ошибка происходила непосредственно в процессе перезагрузки, то система начинала циклически перезагружаться снова и снова. Тот факт, что проблема оставалась даже после перезагрузки, мог означать, что ошибка была не в оперативной памяти, а во флэш-памяти или в аппаратном сбое EEPROM. Последний случай, вероятнее всего, означал бы выход ровера из строя. Предполагая, что ошибка может быть именно во флэш-памяти или EEPROM, инженеры предприняли действия по перезагрузке ровера без использования флэш-памяти. Имелась возможность передавать ограниченный набор команд по радио, достаточный, однако, для того, чтобы приказать марсоходу перезагрузиться без использования флэш-памяти, что, в конечном итоге, привело к разрыву «перезагрузочной петли» и восстановлению работоспособности.
24 января 2004 года инженеры ровера объявили, что проблема была во флэш-памяти и программном обеспечении, использовавшем её для записи. Было заявлено, что аппаратная часть флэш-памяти работала нормально, а программный модуль управления файлами оказался «недостаточно отказоустойчивым» для выполняемых «Спиритом» операций, подчеркивая, что проблема была вызвана именно ошибкой в программном обеспечении, а не неисправностью оборудования. Инженеры НАСА обнаружили, что в файловой системе содержалось слишком много файлов, что было классифицировано как незначительная проблема. Большинство из них содержали данные, собранные во время полета, и не были нужны для дальнейшей работы. Придя к этому выводу, инженеры удалили часть файлов и переформатировали файловую систему на флэш-памяти. 6 февраля (33-й сол) марсоход был приведён в рабочее состояние, и научные исследования возобновились.
Первое бурение на Марсе[править | править код]

Круглое неглубокое отверстие на изображении образовано в ходе первого бурения породы на Марсе. Инструмент RAT на марсоходе Спирит проделал углубление в камне, названном Адирондак, 6 февраля 2004 года (34-й сол). Глубина отверстия составляет 2,65 мм, а диаметр — 45,5 мм. Оно открывает свежие горные породы для ближайшего исследования с помощью микроскопической камеры и двух спектрометров, которые находятся на руке-манипуляторе. Этот снимок был сделан панорамной камерой, с помощью его можно быстро определить успешность бурения.
«RAT превзошел все наши ожидания», — сказал Стив Горевэн, ведущий ученый инструментов соскабливания породы на обоих роверах. «С такими параметрами сверления, я не думал, что оно будет настолько глубоким. На самом деле, когда мы увидели практически идеальный круг, я был взволнован; я мог о таком только мечтать. Также отверстие было хорошо очищено от пыли».
Камень Мими (40-й сол)[править | править код]

Это цветное изображение, сделанное панорамной камерой «Спирита» на 40-й сол (13 февраля 2004 года). На снимке камень под названием Мими. Мими — всего лишь один из множества камней в этой области. Область носит название Stone Council (Братство Камня, от одноимённого романа), но камень отличается от всех любых камней, которые ученые увидели в кратера Гусева до сих пор. Чешуйчатая поверхность камня Мими приводит ученых к ряду гипотез. Мими, возможно, был подвергнут высокому давлению вследствие захоронения в глубоких слоях или ударного воздействия, или он когда-то был частью дюны, спрессовавшейся в виде чешуйчатых слоёв, процесс, который иногда связан с действием воды.
Камень Хамфри[править | править код]

5 марта 2004 года НАСА объявило, что «Спирит» нашёл указания на наличие воды в прошлом в камне под названием «Хамфри». Доктор Раймонд Арвидсон, профессор университета МакДоннела, кафедры планетарных наук в Университете Вашингтона, Сент-Луисе, сообщил во время конференции НАСА, прессе: «Если бы мы нашли этот камень на Земле, мы бы сказали, что он вулканический, и в нём побывало немного жидкости, которая двигалась по его трещинам». В отличие от камня, найденного марсоходом «Оппортьюнити», этот образец сформировался из магмы, а затем в его небольших трещинах появился ярко окрашенный материал, который выглядит как кристаллизовавшиеся минералы. Если эта интерпретация верна, то минералы, скорее всего, возникли из водного раствора, который воздействовал на него после того, как камень сформировался.
Кратер Бонневиль[править | править код]
11 марта 2004 года (65-й сол) «Спирит» достиг кратера Бонневиль, проехав 370 м. Кратер имеет около 200 метров в диаметре, его поверхность на 10 м ниже окружающей поверхности. В Лаборатории реактивного движения решили, что нет смысла отправлять марсоход внутрь кратера, так как они не видят в нём интересных для исследования объектов. «Спирит» поехал вдоль южного края кратера и направился на юго-запад к холмам Колумбии.
.jpg)
Кратер Миссула[править | править код]
На 105-й сол «Спирит» достиг кратера Миссула с приблизительным диаметром 100 м и глубиной около 20 м. Кратер Миссула не был сочтён приоритетной целью для исследования, поскольку он не содержит горных пород, более древних, чем ранее изученные. Ровер обогнул его по северному краю и направился на юго-восток.

Кратер Лахонтен[править | править код]

«Спирит» достиг кратера Лахонтен на 118-й сол и ехал по его краю до 120-го сола. Кратер Лахонтен имеет около 50-60 метров в диаметре и около 10 метров в глубину. Длинная дюна простирается далеко от его юго-западного края; марсоход обошёл её, так как неизвестные дюны представляют большой риск для колёс ровера, которые могут забуксовать в мягком грунте.
Холмы Колумбия[править | править код]
На 159-й сол «Спирит» достиг одной из многих целей на Холмах Колумбии — места, названного Западный Отрог (West Spur). Лощина Хэнка (Hank’s Hollow)[20] у подножия Холмов Колумбии изучалась в течение 23 солов; в ней был обнаружен необычный камень, названный «Горшок с Золотом» (Pot of Gold).
«Спирит» взял путь к скале под названием «Шерстяная Заплатка» (Wooly Patch) и изучал её с 192-го по 199-й сол. На 203-й сол «Спирит» ехал на юг, вверх по склону, и прибыл к обнажению скальных пород, названному «Кловис» (Clovis). Скала изучалась с 210-го по 225-й сол. После Кловис ровер изучал другие цели — Авен (226—235 сол), Тетл (Tetl, «камень» на языке майя, 270 сол), Учбен (Uchben — «древний») и Паленке (Palenque, 281—295 сол), Лютефиск (Lutefisk, 296—303 сол). В течение 239—262 сол «Спирит» был остановлен из-за верхнего соединения Марса, так как в это время Солнце находится между Землёй и Марсом и связь между ними невозможна.
«Спирит» ездил вокруг холма Хасбанда (Husband Hill, назван в честь астронавта Р. Хасбанда, погибшего в катастрофе шаттла «Колумбия»), и в 344 сол был готов направиться к «Cumberland Ridge», «Larry’s Lookout» и «Tennessee Valley».

2005[править | править код]
На 371 сол «Спирит» прибыл к камню под названием «Спокойствие» в верхней части хребта Камберленд. «Спирит» исследовал камень с помощью инструмента RAT на 373 сол.
К 390 сол (в середине февраля 2005 г.) «Спирит» поехал в направлении места «Larry’s Lookout», под гору в обратном направлении. Инженеры пытались сохранить столько энергии, сколько бы хватило для подъёма в гору.
«Спирит» в пути выполнил ряд задач, в том числе исследовал почву, под названием «Пасо Роблес», в ней ровер обнаружил наибольшую концентрацию соли, которое было найдено на Красной планете. Также почва содержала большое количество фосфора, однако не так много, как у камня «Wishstone». Скваерс сказал насчёт открытия: «Мы все ещё пытаемся разобраться, что это означает, но, очевидно, что с большой концентрацией соли вокруг, раньше здесь был рукав воды».
-
 Камень «Горшок с Золотом»
Камень «Горшок с Золотом» -
 «Спирит» поднимается к «Husband Hill»
«Спирит» поднимается к «Husband Hill» -
 Искусственное изображение — «Спирит» на месте «Larry’s Lookout»
Искусственное изображение — «Спирит» на месте «Larry’s Lookout» -
 Закат на Марсе, «Спирит» в кратере Гусева, 19 мая 2005 года
Закат на Марсе, «Спирит» в кратере Гусева, 19 мая 2005 года




Пыльные вихри[править | править код]
К 9 марта 2005 года производительность солнечных панелей марсохода снизилась до 60 %, тогда как изначально было 93 %. 10 марта ровер наблюдал за пыльными дьяволами. Ученые НАСА предполагают, что пыльные дьяволы должны очистить солнечные панели от пыли, тем самым значительно увеличив продолжительность миссии. Это первый пыльный дьявол, который когда-либо замечали «Спирит» или «Оппортьюнити», также это один из лучших моментов миссии. Ранее их сфотографировал только зонд «Пасфайндер» с марсоходом «Соджорнер».
Члены миссии «Спирита» сообщили, что 12 марта 2005 года счастливая встреча с пыльным дьяволом очистила солнечные батареи от пыли. Уровень вырабатываемой энергии резко вырос, ежедневные исследования будут расширены.

Прибытие к холму Хасбанда[править | править код]
На 582 сол, 21 августа 2005 года «Спирит» достиг вершины холма Хасбанда, была получена 360-градусная панорама.

2006[править | править код]
В 2006 году «Спирит» отправился к плато под названием Домашняя плита (англ. Home Plate), и достиг её в феврале.
Домашняя плита (744 сол)[править | править код]


«Спирит» прибыл к северо-западной части Домашней плиты и поднялся на слоистые обнажения к 744 сол (7 февраля 2006 года), приложив для этого большие усилия. С помощью манипулятора были проведены научные исследования.
В 2007 году «Спирит» провел несколько месяцев у основания Домашней плиты. К 1306 сол марсоход взобрался на восточный край Домашней плиты. В сентябре и октябре ровер исследовал горную породу и грунт в разных местах южной части Домашней плиты. 6 ноября «Спирит» достиг западного края Домашней плиты и начал передавать панорамные снимки плато.
Холм МакКула[править | править код]

Следующая остановка «Спирита» была запланирована на северном склоне холма МакКула, где «Спирит» будет получать достаточное количество солнечного света во время марсианской зимы. На 16 марта 2006 года, JPL объявило, что у «Спирита» начались проблемы с правым передним колесом, вскоре оно вообще перестало работать. Несмотря на это, «Спирит» по-прежнему делает успехи в исследовании холма МакКула, в связи со сломанным колесом, инженеры перепрограммировали ровер, теперь он будет ехать задом, волоча за собой поломанное колесо. В конце марта «Спирит» столкнулся с рыхлой почвой, которая препятствует исследованию холма МакКула. Было принято решение о прекращении исследования холма МакКула и вместо этого его отправили исследовать соседний хребет под названием «Небольшой приют».
Хребет «Небольшой приют»[править | править код]
Добравшись до хребта 9 апреля 2006 года, ровер припарковался на гребне с углом наклона в 11° к северу, «Спирит» провел восемь месяцев на гребне, в это время он наблюдал за ближайшими окрестностями. Ровер не передвигался, так как у него был низкий уровень энергии, проблемы с энергией он испытывал во время марсианской зимы. Ровер сделал своё первое движение, когда совершил короткий манёвр к камню, чтобы он был в пределах досягаемости роботизированной руки, в начале ноября 2006 года, после коротких дней верхнего соединения Марса, связь с Землёй была ограничена.
Во время нахождения «Спирита» на хребте «Небольшой приют» он исследовал два камня и получил химический анализ, подобный составу метеорита «Heat Shield Rock», который нашёл марсоход «Оппортьюнити». Названный «Чжун Шань» в честь людей: Сунь Ят-сена и Аллан Хиллз, за место в Антарктиде, где было найдено несколько марсианских метеоритов, они выделялись на фоне снега, так как были темнее его. Далее проводилось спектрографическое тестирование, чтобы определить точный состав пород, которые могут оказаться метеоритом.
2007[править | править код]
Обновление программного обеспечения[править | править код]
4 января 2007 года, к 3-й годовщине посадки, программное обеспечение марсоходов было обновлено. Теперь марсоход мог самостоятельно принимать решение о необходимости передачи изображения, изучения горной породы, протягивания манипулятора и т. д., без участия операторов с Земли. Это существенно ускорило исследования, так как отпала необходимость согласования действий аппарата, который больше не ждал радиосигнала из НАСА, и упростило работу исследователей, до этого самостоятельно анализировавших сотни изображений, приходящих от марсохода.
Открытие «Ключа»[править | править код]

Нерабочее колесо «Спирита» принесло пользу для программы. Ровер с декабря 2007 года тянет за собой неработающее колесо, которое соскабливает верхний слой марсианского грунта, открывая новые участки земли. Учёные считают, что такие срезы содержат достаточно сведений о прошлом окружающей среды Марса, которая, по их мнению, могла подходить для жизни микробов.
Она похожа на районы Земли, где вода или пар от горячих источников вступают в контакт с вулканическими породами. «На Земле эти места, как правило, кишат бактериями», — сказал главный оператор марсохода Стив Скуирес. «Мы этому очень рады», — добавил на встрече Американского геофизического союза (AGU). Этот район содержит высокую концентрацию кремнезёма — главного компонента стекла. Исследователи пришли к выводу, что данный материал мог образоваться только двумя способами. Первый: горячие месторождения под землёй, когда вода растворяется с кремнезёмом в одном месте, а затем извергается наружу (например, гейзером). Второй: кислый пар, поднимающийся через трещины в горных породах, впитывает минеральные компоненты, затем оставляет позади них кремнезём. Важная вещь состоит в том, какая из гипотез верна, так как это имеет значение о прошлом среды на Марсе. Скуирес объяснил для BBC News, что горячая вода представляет собой среду, в которой микробы могут свободно развиваться, производя кремнезём. Скуирес добавил: «В любом месте Земли вы можете найти горячие источники, а в ней есть все необходимые компоненты для микробной жизни».
Пыльный шторм[править | править код]

К концу июня 2007 года пылевые бури начали закрывать марсианскую атмосферу пылью. Пыльная буря усилилась, и 20 июля как у «Оппортьюнити», так и у «Спирита» появилась реальная опасность выйти из строя из-за отсутствия солнечного света, который нужен им для выработки энергии. НАСА распространило сообщение для прессы, в котором говорилось: (частично) «Мы верим в наши роверы, и надеемся, что они переживут этот шторм, но они не разрабатывались для таких условий». Основная проблема заключалась в том, что пыльная буря резко снизила поступление солнечного света. В атмосфере Марса находится так много пыли, что она блокирует 99 процентов прямых солнечных лучей, которые должны падать на солнечные панели. Марсоход «Спирит», который работает на другой стороне Марса, получал немного больше света, чем его близнец «Оппортьюнити».
Обычно солнечные батареи на роверах вырабатывали около 700 ватт·час (2,5 МДж) энергии в день. Во время бури они вырабатывали значительно меньше энергии, роверы генерировали только 128 ватт·час (0,48 МДж) в день. Если роверы будут вырабатывать менее 150 ватт·час (0,54 МДж) в день, то они начнут терять заряд аккумуляторов. Если аккумуляторы иссякнут, то основное оборудование, скорее всего, выйдет из строя из-за сильного холода. Инженеры запрограммировали оба ровера на низкое потребление энергии для того, чтобы переждать бурю. В конце августа буря начала ослабевать, что позволило роверам успешно зарядить свои аккумуляторы. Они продолжали находиться в спящем режиме, чтобы переждать остатки бури.
2008[править | править код]

10 ноября 2008 года из-за обширных пылевых бурь выработка энергии сократилась до 89 Вт·час в день — критический уровень. Сотрудники НАСА выразили надежду, что «Спирит» переживёт бурю, выработка энергии увеличится, и что ветер очистит солнечные панели от пыли. Инженеры пытались сэкономить энергию за счёт отключения некоторых приборов, включая обогреватели. 13 ноября 2008 года марсоход проснулся и осуществил контакт с ЦУП по расписанию.
С 14 ноября 2008 года по 20 ноября 2008 года солнечные панели «Спирита» вырабатывали 169 Вт·час в день. Обогреватель Теплового Эмиссионного Спектрометра (который потреблял около 27 ватт·час энергии в день) был отключен 11 ноября 2008 года, его тестирование показало, что он повреждён, его отключение позволило сэкономить значительную часть энергии, так необходимую для основных обогревателей ровера. Вскоре произошло верхнее соединение Марса (положение, когда Солнце находится между Марсом и Землёй), и поэтому с 29 ноября 2008 года по 13 декабря 2008 года общение с марсоходом было невозможно.
2009[править | править код]

6 февраля 2009 года ветер удачно сдул часть пыли с солнечных панелей. Это привело к увеличению выработки энергии до 240 ватт·час в день. НАСА заявило, что прибавка энергии будет использоваться преимущественно для передвижения.
С 18 по 28 апреля выработка энергии продолжала увеличиваться, за счёт новых очисток панелей ветром. Выработка энергии поднялась с 223 ватт·час в день (31 марта) до 372 ватт·час в день (29 апреля).
Увязание в песчаной дюне[править | править код]
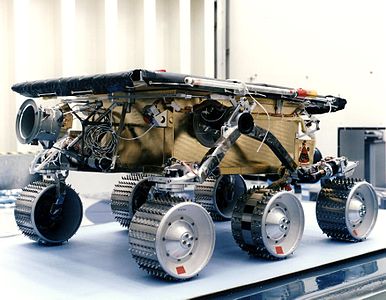
1 мая 2009 года ровер застрял в мягком грунте, богатом сульфатом железа (ярозитом) и скрытом под коркой нормального грунта. Сульфат железа очень рыхлый, и колёса ровера прокручиваются в нём. Члены команды Лаборатории реактивного движения воссоздали ситуацию с помощью макета марсохода на Земле и проводили с ним испытания; также они проводили компьютерное моделирование в попытках найти выход из сложившейся ситуации. Ситуацию трудно воспроизвести на Земле, так как на Марсе меньше сила тяжести и слабее атмосферное давление. Тесты с макетом «Спирита» были проведены в Лаборатории реактивного движения в специальной песочнице, чтобы попытаться сымитировать рыхлый грунт в условиях слабой гравитации. Попытки высвобождения ровера начались 17 ноября 2009 года.
17 декабря 2009 года правое переднее колесо неожиданно отработало в нормальном режиме в течение первых трёх попыток вращения. Было неизвестно, насколько это поможет, так как правое заднее колесо вышло из строя 28 ноября и оставалось неработающим до конца миссии. У ровера оставалось только четыре полностью работающих колеса. Возникла опасность, что если команда не сможет освободить ровер и отрегулировать угол наклона солнечных панелей, то марсоход сможет продержаться только до мая 2010 года.

2010[править | править код]
Стационарная платформа для исследований[править | править код]

26 января 2010 года, после нескольких месяцев неудачных попыток освобождения марсохода, НАСА решило переименовать миссию ровера, назвав его стационарной платформой для исследований. Усилия были направлены на подготовку более подходящего положения по отношению к Солнцу для обеспечения эффективной подзарядки аккумуляторов ровера. Это было необходимо для сохранения самых нужных инструментов во время марсианской зимы.
Последний сеанс связи[править | править код]
Последняя связь с марсоходом была на 2210 сол (22 марта 2010 года). Есть большая вероятность того, что батареи марсохода потеряли так много энергии, что в какой-то момент часы миссии остановились. В предыдущие зимы марсоход смог оставаться в благоприятных условиях освещения и сохранять свою внутреннюю температуру не ниже −40 °C, но так как марсоход застрял в песке, из-за чего его солнечные батареи не были повернуты под оптимальным углом к Солнцу, по оценкам, его внутренняя температура упала примерно до −55 °C.
30 марта 2010 года «Спирит» не вышел на запланированный сеанс связи, и, как предполагают инженеры, перешёл в спящий режим из-за нехватки энергии.
2011[править | править код]
Конец миссии[править | править код]
Лаборатория реактивного движения продолжала попытки восстановить контакт со «Спиритом» до 25 мая 2011 года, когда НАСА объявило о прекращении усилий восстановить с ним контакт, а также о завершении миссии. Основной причиной выхода марсохода из строя считается воздействие низких температур, повредивших важные детали и оборудование. Из-за суровых марсианских зим и недостаточного количества солнечного света марсоход получал недостаточно энергии, поэтому обогреватели работали нестабильно.
Награды[править | править код]
За неоценимый вклад «Спирита» в изучение Марса, в его честь был назван астероид (37452) Спирит (Spirit). Название предложила Ингрид ван Хаутен-Груневельд, которая вместе с Корнелисом Йоханнесом ван Хаутеном и Томом Герелсом обнаружили этот астероид 24 сентября 1960 года.
Фильмография[править | править код]
- Три эпизода документального сериала «Nova»
- «Камни Марса. Год спустя», 2005
- «Катание по Марсу», 2006
- «Пять лет на Марсе (Марсианские роботы)», 2008
- «Гибель марсохода» (англ. Death of a Mars Rover), 2011
Галерея[править | править код]
-
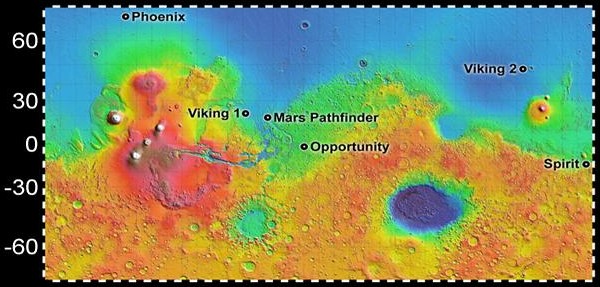 Место посадки на Марсе среди других аппаратов («Спирит» — справа)
Место посадки на Марсе среди других аппаратов («Спирит» — справа) -
 «Соджорнер» — первый успешный марсоход, работавший в 1997 году
«Соджорнер» — первый успешный марсоход, работавший в 1997 году -
 Марсоход «Оппортьюнити» — близнец «Спирита»
Марсоход «Оппортьюнити» — близнец «Спирита» -
 «Кьюриосити» — марсоход нового поколения
«Кьюриосити» — марсоход нового поколения


.jpg)

Места посадок автоматических станций на Марсе[править | править код]

Примечания[править | править код]
- ↑ Масса марсохода. Дата обращения: 2 декабря 2019. Архивировано 18 января 2017 года.
- ↑ Technologies of Broad Benefit: Power. Дата обращения: 21 октября 2012. Архивировано из оригинала 28 марта 2015 года.
- ↑ Speed rover. Дата обращения: 2 декабря 2019. Архивировано 18 января 2017 года.
- ↑ Документ с сайта НАСА (англ.) (pdf). Архивировано из оригинала 15 марта 2012 года.
- ↑ «Спирит» на сайте Грамота.ру
- ↑ Сайт проекта. Дата обращения: 12 мая 2013. Архивировано 16 декабря 2008 года.
- ↑ Максим Борисов. Названия американским марсоходам дала девятилетняя сирота из Сибири. Грани.Ру (10 июня 2003). Дата обращения: 17 мая 2010. Архивировано из оригинала 24 августа 2011 года.
- ↑ 1 2 Mars Exploration Rover Landings (нем.). JPL. Дата обращения: 30 июля 2012. Архивировано 14 сентября 2012 года. Архивная копия от 14 сентября 2012 на Wayback Machine
- ↑ 1 2 3 Mars Pathfinder/Sojourner (нем.). NASA. Дата обращения: 30 июля 2012. Архивировано 25 февраля 2014 года. Архивная копия от 25 февраля 2014 на Wayback Machine
- ↑ NASA’s 2009 Mars Science Laboratory (нем.). JPL. Дата обращения: 5 июня 2011. Архивная копия от 19 сентября 2020 на Wayback Machine
- ↑ Pathfinder Mars Mission – Sojourner mini-rover (нем.). Дата обращения: 5 июня 2011. Архивная копия от 17 декабря 2010 на Wayback Machine
- ↑ Mars Science Laboratory: NASA Hosts Teleconference About Curiosity Rover Progess. Дата обращения: 2 декабря 2019. Архивировано из оригинала 8 марта 2016 года.
- ↑ Spacecraft: Surface Operations: Rover (нем.). JPL. Дата обращения: 30 июля 2012. Архивировано 21 сентября 2013 года. Архивная копия от 21 сентября 2013 на Wayback Machine
- ↑ Introduction to the Mars Microrover (нем.). JPL. Дата обращения: 30 июля 2012. Архивировано 21 октября 2011 года. Архивная копия от 21 октября 2011 на Wayback Machine
- ↑ Mars Exploration Rover Telecommunications (нем.). JPL. Дата обращения: 5 июня 2011. Архивная копия от 20 сентября 2020 на Wayback Machine
- ↑ The Robot Hall of Fame: Mars Pathfinder Sojourner Rover (нем.). robothalloffame.org. Дата обращения: 5 июня 2011. Архивировано 7 октября 2007 года. Архивная копия от 7 октября 2007 на Wayback Machine
- ↑ Avionics Innovations for the Mars Exploration Rover Mission: Increasing Brain Power (нем.). JPL. Дата обращения: 30 июля 2012. Архивировано 25 февраля 2014 года. Архивная копия от 25 февраля 2014 на Wayback Machine
- ↑ Institut für Planetenforschung Berlin-Adlershof (нем.). Дата обращения: 27 июля 2012. Архивировано 4 марта 2016 года. Архивная копия от 4 марта 2016 на Wayback Machine
- ↑ Mars Science Laboratory: Brains. Дата обращения: 2 декабря 2019. Архивировано 24 февраля 2019 года.
- ↑ Названа в честь покойного Генри «Хэнка» Мура (Henry «Hank» J. Moore II), учёного, участвовавшего в миссиях «Викинг» и «Пасфайндер».
Ссылки[править | править код]
- Сайт проекта
- Новости о Спирит на сайте Compulenta.ru. Архивировано из оригинала 14 июня 2006 года.
Для улучшения этой статьи желательно:
|
Программа Mars Exploration Rover | ||
|---|---|---|
| Основное |
|   |
| Марсоход «Спирит» | ||
| Марсоход «Оппортьюнити» | ||
| Инструменты | ||
| Связанное | ||
Исследование Марса космическими аппаратами | |
|---|---|
| Пролётные | |
| Орбитальные | |
| Посадочные | |
| Марсоходы | |
| Марсолёты | |
| Запланированные |
|
| Предложенные | |
| Потерянные | |
| Отменённые | |
| См. также | |
Полужирным выделены действующие космические аппараты | |
Летательные аппараты и ракетно-космическая техника корпораций Lockheed и Lockheed Martin | |
|---|---|
| Истребители | |
| Ударные | |
| Военно-транспортные | |
| Разведывательные | |
| Пассажирские | |
| Тяжеловооружённые | |
| Общего назначения | |
| Учебно-тренировочные | |
| Патрульные | |
| Беспилотные | |
| Вертолёты | |
| Космические аппараты | |
| Спутники | |
| Военные спутники | |
| Ракеты-носители | |