У этого термина существуют и другие значения, см. Siam и Little David.
Испытания ракеты на полигоне «Уайт-Сендз» по беспилотному вертолёту-мишени «Дэш»
SIAM ([saɪˈæm], чит. «Сайе́м», бэкр. от Self Initiated Anti-Aircraft Missile, буквально «самозапускающаяся зенитная ракета») — американская самозапускающаяся зенитная управляемая ракета (ЗУР) и приспособленная для использования в качестве противовоздушной мины. Была разработана компанией Ford Aerospace[en] (подразделение компании Ford) совместно с Librascope (подразделение корпорации Singer) по заказу Агентства по перспективным оборонным научно-исследовательским разработкам (DARPA) с начала 1970-х по начало 1980-х гг. Руководство ходом работ по проекту осуществлялось Управлением ракетных войск Армии США[1]. Проект предусматривал создание полностью автономной зенитной ракеты, которая могла бы самостоятельно обнаружить пролетающий рядом летательный аппарат своей головкой самонаведения (ГСН), самостоятельно запуститься и поразить обнаруженное средство воздушного нападения (СВН) противника. Считается первым в мире полностью автоматическим зенитным ракетным комплексом (не требует сопрягаемых средств обеспечения запуска и системы управления огнём, обходится без внешнего целеуказания) и первой в мире зенитной миной подводного базирования[1]. Ракета успешно прошла испытания, но не была запущена в производство.
SIAM предназначался для поражения целей типа «истребитель» на взлёте при самозапуске из наземного контейнера и «противолодочный вертолёт» при стрельбе с подводных лодок в погруженном состоянии
В первой половине 1970-х ДАРПА начало работы по программе с кодовым названием «Литтл Дэвид» (Little David)[2] по созданию «противовоздушных мин» — полностью автономных батарей зенитных ракет ближнего радиуса действия, которые могли бы длительное время находиться в режиме пассивного выжидания, функционируя без обслуживания и стороннего контроля, которые предполагалось разместить скрытно у аэродромов базирования советской авиации в западных группах войск, дислоцировавшихся в ГДР, ВНР и ЧССР. Мины активизировались от срабатывания акустического датчика, настроенного на шум взлетающего самолёта (сбивать СВН предполагалось на взлёте, когда самолёт ещё не набрал большой скорости и высоты).[3] Создание такого рода оружия преследовало целью полную нейтрализацию аэродромов противника (airfield denial).[2] Дополнительной сферой применения противовоздушных мин была борьба с советскими противолодочными вертолётами, для этих целей ими предполагалось снабжать американские подводные лодки[2]. Тогда же были начаты работы над инфракрасной головкой самонаведения бокового обзора для самонаводящихся зенитных мин[3] (строго говоря, она представляла собой не «головку», а направленный вбок «глаз», и находилась не в головной части, а в серединной части ракеты, но здесь и далее под ГСН понимается устройство самонаведения данной ракеты в целом, включавшее в себя инфракрасный прибор обнаружения в серединной части и радиолокационный прибор сопровождения в головной части). За основу предполагалось взять ИКГСН типа используемой ПЗРК «Редай».[2] После пуска ракета летела строго вертикально, в это время ГСН сканировала зону обстрела правильной цилиндрической формы на предмет наличия в ней подходящей по параметрам цели. При запуске из-под воды, после входа ракеты в атмосферу, ГСН непрерывно работала в режиме «поиск—сопровождение» (search/track). При запуске с земли, ГСН сначала работала в режиме поиска, а зафиксировав цель и достигнув заданной высоты, ракета закладывала вертикальный манёвр курсом, высотой и скоростью в направлении цели, после того как ракета заходила на курс и цель оказывалась в поле обзора следящего координатора цели, ГСН переключалась с режима обнаружения на режим сопровождения цели (acquisition/tracking handover). Ракета ориентировалась в полёте на тепловой след цели и летела в режиме преследования на догонных курсах в предполагаемую точку встречи с целью в зависимости от конкретных обстоятельств воздушной обстановки используя либо метод пропорционального сближения (типичный для самонаводящихся зенитных ракет), либо метод погони, либо комбинированный двухточечный метод наведения на основе двух вышеназванных, меняя траекторию полёта в зависимости от действий преследуемого СВН, для этих целей в программное обеспечение ГСН были заложены параметры пяти стандартных противоракетных манёвров, к которым могли прибегнуть советские лётчики[4]. Траектория полёта при пропорциональном сближении с целью представляла собой С-образную кривую, при погоне за целью она представляла собой извилистую З-образную кривую с несколькими завитками, продуцируемыми в результате компенсации рулевой машинкой параметра рассогласования, возникающего с одной стороны от манёвров цели, а с другой стороны от неравномерной реактивной тяги двигателя, обусловленной газодинамикой процесса сгорания твёрдого топлива. В головной части ракеты располагался неконтактный датчик цели сопряжённый с предохранительно-исполнительным механизмом и срабатывавший на приближение к цели. Вероятное пространственное отклонение ракеты от цели при нормальной работе ГСН колебалось в пределах от 0 до 6 метров[5]. В 1977 году сведения о программе впервые появились в прессе. Подобные «мины», по мнению разработчиков, могли быть использованы для создания районов противовоздушной обороны в труднодоступных областях (например, в северных провинциях Канады или в арктических льдах), где размещение и обслуживание традиционных ЗРК было бы излишне дорого. Рассматривалась и возможность «активных минных постановок» — размещения автономных ракетных батарей на территории противника с помощью бомбардировщиков, с целью осложнить действия неприятельской авиации у её авиабаз. Привлечённые в качестве подрядчиков компании «Форд аэроспейс» и «Либраскоп» отвечали за разработку ракеты и подводные аспекты её применения соответственно. К работе над инфракрасной системой самонаведения были привлечены Сандийские национальные лаборатории, администрировавшиеся по контракту корпорацией «Сандия» (филиалом AT&T).[6]Концептуальная проработка, фундаментальные исследования и технический анализ проекта проводились корпорациями «Рэнд» и «Дженерал дайнемикс», были использованы результаты работ, проведённых Кембриджскими исследовательскими лабораториями[en] ВВС США, технические данные средств воздушного нападения вероятного противника были предоставлены Разведывательным управлением Министерства обороны США.[7]
Согласно проекту, предполагалось создать небольшую твердотопливную ракету, которая будет выставляться на позицию в транспортном контейнере. Обнаружив самолёт противника своей пассивной ГСН, ракета должна была запустить двигатель и атаковать летательный аппарат. Согласно требованиям тактико-технического задания (ТТЗ), ГСН должна была сканировать воздушное пространство в двухцветном диапазоне и обеспечивать эффективное обнаружение цели типа «вертолёт» на дальностях до 4,5 км, таким образом зона прикрытия одной ракеты образовывала круг 9 км в диаметре[3]. Среднее время полёта ракеты до цели составляло около двадцати секунд[8] максимальное значение периода времени для покрытия ракетой активного участка траектории полёта было ограничено 22 секундами[9]. При запуске из-под воды, из шахты установки вертикального пуска подводной лодки, независимо от положения цели в пространстве относительно стартовой позиции, ракета летела вверх строго вертикально до высоты 750 метров, после чего начинала закладывать петлю либо горку (в зависимости от действий обстреливаемой цели) с максимальной точкой возвышения 1200 метров и точкой разворота в направлении цели на высоте 700 метров. Ожидаемая высота встречи с целью при таком сценарии применения составляла около 150 метров над уровнем моря[10]. Ракета была исходно спроектирована по аэродинамической компоновочной схеме «Утка» с прямоугольным оперением в хвостовой части и закруглённым оперением в головной части[11]. Впоследствии, однако, была реализована нормальная аэродинамическая схема, вынесенное вперёд оперение было удалено. В качестве модельной цели, лётные характеристики которой закладывались в программное обеспечение и использовались в моделировании зенитного боя, был взят МиГ-21[12]. Как и для других ракет самонаводящихся на источник инфракрасного излучения, погодно-климатические факторы, такие как туман и облачность нижнего яруса, резко снижали дальность обнаружения цели и, как следствие, боевые возможности SIAM[13]. Поскольку, в случае обстрела цели из-под воды, ракета заходила на цель сверху вниз, главным угрожающим фактором помеховой обстановки был естественный инфракрасный фон, формируемый отражёнными от водной поверхности солнечными лучами, в тот момент когда ракета заходила на курс и находилась параллельно водной поверхности, соответственно чему линза объектива приёмника инфракрасного излучения (перпендикулярная продольной оси ракеты) испытывала пиковые помеховые нагрузки от фоновых тепловых и оптических помех, что грозило перезахватом барашков волн вместо истинной цели. В режиме пассивного выжидания фоновое излучение неба приводило к ложным срабатываниям (именно потому в качестве активатора ракеты был избран акустический датчик, ориентировавшийся на звук взлетающего самолёта), в связи с чем, от момента обнаружения цели до запуска ракеты проходило определённое время, необходимое для того, чтобы бортовая аппаратура ракеты удостоверилась в том, что сопровождаемый объект действительно является летательным аппаратом, а не отражёнными солнечными лучами[14]. Водная поверхность, облачный покров и безоблачное небо имели сопоставимые значения фонового излучения (в микроваттах на см²), именно водная поверхность обладала наибольшей отвлекающей способностью[15]. Вероятность обнаружения цели при безоблачной погоде составляла 98 % в пределах радиуса досягаемости приёмника инфракрасного обнаружения[8]. При этом, ситуация осложнялась тем обстоятельством, что применение светофильтров, снижавших светочувствительность приёмника инфракрасного излучения до требуемых значений, чтобы минимизировать ложные срабатывания и исключить отклонение ракеты от цели на солнечные блики или тепловые ловушки приводила к снижению эффективной дальности обнаружения целей ГСН и к её неспособности самостоятельно обнаружить и захватить цель[15]. Основным полупроводниковым материалом приёмника инфракрасного излучения исходно был выбран антимонид индия (InSb), требовавший для нормального функционирования рабочей среды охлаждённой до −196 °C. Для работы при более приемлемой температуре −73 °C было предложено использовать ртутно-кадмиевыйтеллурид (HgCdTe), достаточно распространённый при создании ГСН управляемых ракет, а также применяемый в приборах ночного видения[16].
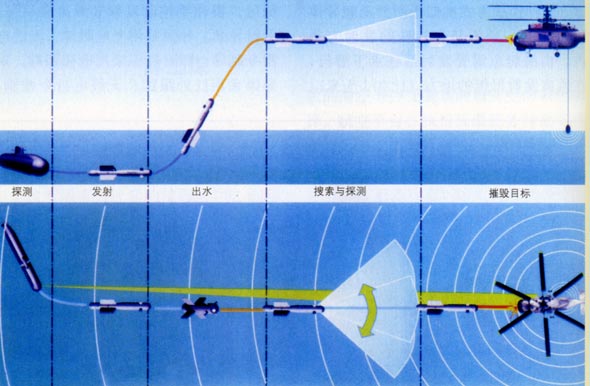
Проектом также заинтересовалось командование ВМС США, рассматривавшее возможность применения ракет для самообороны подводных лодок. Предполагалось, что подводная лодка, находящаяся в районе высокой активности противолодочной авиации противника, сможет обнаружить приближающийся самолёт или вертолёт по вибрациям заданной амплитуды в толще воды, создаваемым потоком воздуха из-под винта вертолёта или шумом двигателей самолёта, запустит на поверхность всплывающий буй с SIAM. В отличие от других экспериментальных подходов, реализовавших запуск зенитных ракет непосредственно с самой подводной лодки (из установки вертикального пуска или из торпедного аппарата), идея применения всплывающего буя с SIAM не демаскировала саму субмарину, так как буй всплывал независимо и мог быть оснащён программируемым на заданное время механизмом задержки. Впоследствии, тактико-техническое задание было дополнено требованиями создания средства противовоздушной обороны подводных лодок и надводных кораблей, а также объектов береговой инфраструктуры флота.
Траектории и профиль полёта ракеты при стрельбе по противолодочным вертолётам
Траектории и профиль полёта ракеты при стрельбе по взлетающим самолётам
Разработанная фирмой «Ford», SIAM была очень компактной ракетой. В движение её приводил твердотопливный двигатель. Из-за довольно нестандартной конфигурации ГСН, головная часть ракеты была значительно длиннее и больше по объёму внутреннего пространства, чем у ракет аналогичных габаритов. Структурно ракета состояла из головного отсека, в котором размещался радиолокационный следящий координатор цели (АРГСН) и датчик цели с предохранительно-исполнительным механизмом, рулевого отсека с выдвижными рулевыми поверхностями, отсека управления, в котором была заключена бортовая электроника ракеты с бинарным операционно-логическим устройством, отвечающим за выход («пробуждение») ракеты из режима выжидания, активацию/деактивацию ГСН и запуск ракеты, отсека наведения с инфракрасным поисковым оптико-электронным устройством бокового обзора (ИКГСН) внутри, боевого отсека с зарядом взрывчатого веществафугасного типа и готовыми поражающими элементами, двигательного отсека с маршевым двигателем внутри и соплового блока с камерой сгорания и выходным раструбом внутри, и выдвижным хвостовым оперением (крыльями) снаружи. Ракета запускалась из стоящего вертикально трубчатого контейнера (который предполагалось сбрасывать на парашютах с самолётов), оснащённого опорами для правильной установки при сбросе. Головная часть ракеты выступала из контейнера наружу.
Появление в зоне обнаружения самолёта противника автоматически активировало двухдиапазонную головку самонаведения ракеты, реализовавшую в себе технологию пассивного инфракрасного самонаведения с активным радиолокационным самонаведением, которая начинала отслеживать цель. Если цель пролетала мимо, ГСН отключалась и электроника ракеты вновь переходила в режим ожидания. Если цель оказывалась в радиусе поражения, ракета автоматически запускала двигатель, вылетала из контейнера и самонаводилась на цель. ГСН работала в режиме активного радиолокационного самонаведения на начальном и маршевом участках траектории полёта и переключалось на режим пассивного инфракрасного самонаведения на терминальном участке[1].
Устройство ракеты, принцип работы системы наведения и габаритные параметры различных отсеков ракеты
В 1980—1981 годах ракета прошла серию испытательных пусков с наземных пусковых установок. Первый испытательный пуск опытного прототипа ЗУР состоялся на полигоне «Уайт-Сендз» по беспилотному вертолёту QH-50C, пролетавшему на высоте полутора тысяч футов (около 460 метров) в двух милях (около 3220 м) от стартовой позиции, и оснащённому пиропатронами для имитации воздушной цели [17]. В одном случае была в точности имитирована боевая ситуация: ракета, установленная на позиции, самостоятельно засекла, отследила и поразила беспилотный вертолёт. Но ВМС, который должен был отвечать за дальнейшее продвижение программы, в последний момент отказался от SIAM из-за дефицита средств на развитие второстепенных программ. В итоге программа была закрыта.
Источники информации : Air Defense SystemsАрхивная копия от 14 февраля 2017 на Wayback Machine. / Edited by C. E. Howard. — Cointrin, Switzerland: Interavia S.A., 1982. — P. 89-90 — 160 p. — (The International Defense Review Special Series ; 14).
Курсивом выделены перспективные, опытные или не пошедшие в серийное производство образцы. Начиная с 1986-го года для обозначения среды/цели запуска в индексе стали использовать литеры. «A» для воздушных средств, «B» — множественность сред запуска, «R» для надводных кораблей, «U» для подводных лодок и др.

_(3).jpg)


 Траектории и профиль полёта ракеты при стрельбе по противолодочным вертолётам
Траектории и профиль полёта ракеты при стрельбе по противолодочным вертолётам Траектории и профиль полёта ракеты при стрельбе по взлетающим самолётам
Траектории и профиль полёта ракеты при стрельбе по взлетающим самолётам_-_submarine_defense_task.svg)
_-_airfield_denial_task.svg)
{kind=link}
{kind=link}
